南極地球物理学ノート No. 30 (2014.07.08)
Breid湾におけるジオイド高の決定
渋谷和雄・福田洋一・道田豊
Keyword: ジオイド高、楕円体高、平均海水位、標高、GPS相対測位
1. 何故南極でGeoid高決定が重要か
ある地点の標高と楕円体高を計測することは測地学の基本である。両方のデータが得られれば、その地点のジオイド高が決定できて、その測定密度が上がれば、重力場ポテンシャルモデルが改良できる(南極地球物理学ノートNo. 12参照)。しかし、南極大陸縁辺部はそもそも露岩域が少なく、氷床上で高度測定しても値が時間的にすぐ変化してしまうので、安定性に欠ける。また、標高が得られるためには平均海水面に取り付けられる(られた)Bench Markが近くにあることが前提であるが、南極の場合、近くの露岩が100 km内陸であったりしてそれも、なかなか難しい。このように、日本国内では容易でも、1990年代前半までの南極域ではジオイド高決定データは数えるほどしか存在しなかった。
Fig. 1は1990年時点での、計測決定されたジオイド高データの分布図である。Vostok Station以外は沿岸露岩にある越冬基地内の基準点データである。今となっては古くなったGEM10B モデルの36次までのdegree, order係数により計算されたコンター図にプロットされている (Shibuya et al., 1991).McMurdo Station, Syowa Stationのように1-2 m偏差の地点もあるが、大抵は5~10 mの偏差を持つことがわかる。
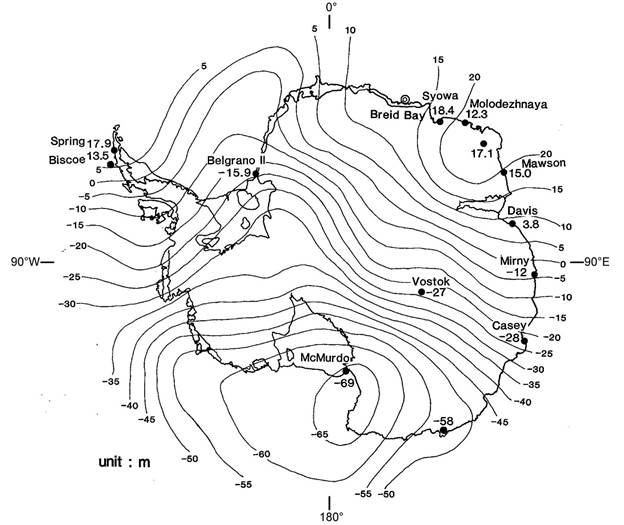 |
| Fig. 1. Geoid height control stations in Antarctica. Contours of 5-m interval indicate model undulations by the GEM10B coefficients up to degree and order of 36 on the NWL-8E Earth ellipsoid. |
このような南極での弱点を克服するためには計測の原点に立ち返って、短期間に設営的に現実的な方法で氷床縁辺域にジオイド高観測点を設置するほかはない。我々は第28次隊(1986-1988)のしらせ5002往路上のブライド湾において、そのような設置実験を行った。
このノートは、その時の成果をまとめたShibuya et al. (1989), Shibuya et al. (1990), Shibuya et al. (1991)を基に、再構成したものである。
2. Geoid高測定の原理
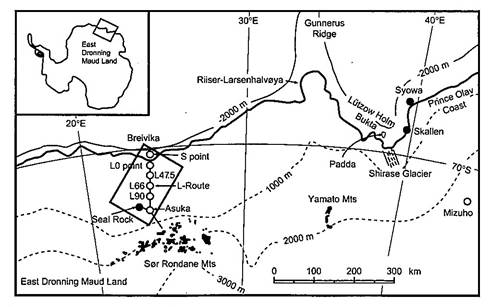
Fig. 2は模式的に描いたGeoid高測定の原理である。1986年12月17日、しらせはブライド湾(Breivika; Fig. 2a,photo 1参照)に進入し、大陸縁から30 kmの地点(S point)にアンカーを取った。
 |
| photo 1. ブライド湾に進入したしらせ5002。船尾のウィンチスタンドにGPS受信器を取り付け、右舷側から水位計を投入した。 |
この機会を利用し、我々はしらせデッキに取り付けたGPSアンテナ(S pointと名付けた)と沿岸氷床上の輸送ルート起点(L0 pointと名付けられた)に設置したGPSアンテナとの間でGPS相対測定を約1時間実施した。用いたGPS受信機SONY GTT-3000 (Fujita et al., 1987) は一周波数用で、今になって考えると原始的なシステムであったが、30 kmの近距離ということもあり、誤差1 m長以内の相対基線ベクトル ![]() =(dx, dy, dz)(Fig. 2b参照)が得られると期待できた。
=(dx, dy, dz)(Fig. 2b参照)が得られると期待できた。![]() がわかるとS pointとL0 pointの比高 h がわかる。
がわかるとS pointとL0 pointの比高 h がわかる。
| (a) |
 |
|
| (b) |
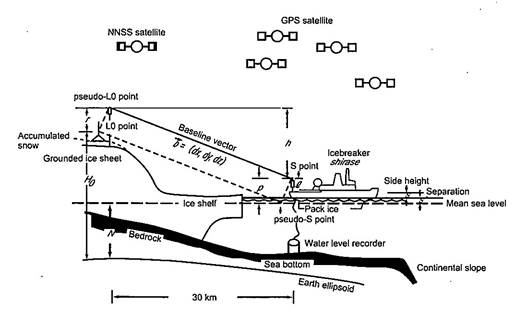 |
| Fig. 2. (a) Simplified topographic map of East Dronning Maud Land, showing S point in Breivika (Breid Bay) and L0 point on the ice sheet. (b) Design diagram to obtain geoid height Ns at S point. For details of the items, see text. |
S pointでは圧力式水位計を200 m水深の海底に設置し、海洋潮汐観測をできるだけ長期間(しらせ5002があすか基地への空輸を行っていてS pointに停泊している約1週間)実施することとした。潮汐変動からすると短期間ではあるが、平均海水位が得られる。そうすればGPS相対測位時の海面の平均海水位からのずれp がわかる。この時期(1986年12月)、第28次隊のあすか基地越冬開始が最優先課題だったので、観測隊はL0 pointには長くは留まれなかった。
しかし、越冬開始後の早い時期(1987年4月ー5月)に,あすか基地からL Routeを約100 km北上する雪上車旅行を実施し(Fig. 2aの矩形参照)、L0 pointでsatellite Doppler受信を約100 pass行うことで、Fig. 2bの楕円体高H0 を求めることが出来る。L0 pointでのGPSアンテナとsatellite Doppler受信に用いたJMR受信機アンテナの相対高度r の測定も重要である。
上記の計測データが得られれば、S pointでのGeoid高Nsは下記(1)式で求められる。
Ns = H0-h -p + r (1)
3. 観測データの解析
3.1 Satellite Doppler測位
JMR-4A二周波受信機により、1987年4月16-19日間に128 passをL0 pointで受信した (photo 2)。この期間の電離層状態は、運の良いことに、昭和基地でのriometer (relative ionospheric opacity meter)によるCNA (Cosmic Noise Absorption) 記録で判断する限り、とても穏やかで全パスを使用できた。
 |
| photo 2. L0 point。左側の竹竿は、1986年12月17日、GPS受信を実施したポイント にマーカーとして設置したものである。中央ロッド状のアンテナがJMR-4AのNNSS 衛星受信アンテナである。赤白のエスロンポールはルート位置番号L0を示す。 |
解析はJMR社のSP-2G program (JMR Instruments Inc., 1982)を使用した。その結果、Table 1aのように95 passがLeast Squares Colocation (LSC) 処理を通過した。高角、あるいは低角すぎる軌道(15˚-75˚の範囲外)は除去することとして、また、軌道上、地平線から7.5˚以下のDoppler dataは編集して除去した。さらに最接近点に対するgeometryの悪い(対称性が2:1より悪い)パスも除去した。地上気象観測は1日3回行い、気温(-13˚~-15˚C)、気圧(958~961 hPa)、相対湿度(0 ~20%)の実測値をSP-2G組み込みのBrown and Trotter (1973)の式を用いて補正した。その結果得られたJMR アンテナ位相中心の最適位置はNWL―10D 楕円体上(a = 6378135 m, f = 1/298.26; Kumar, 1982)で
Ø = 70˚27'15.376"S, λ= 23˚53'21.662"E, H = 190.66 m (2)
であった。
| Table 1a. 放送暦によるL0 point satellite Doppler 測位結果のまとめ | ||
| 項目 | pass数 | |
| 1 | 受信pass総数 | 125 |
| 2 | 許容pass総数 | 95 |
| 3 | 北行pass数 | 48 |
| 4 | 南行pass数 | 46 |
| 5 | 観測点の西側のpass数 | 11 |
| 6 | 観測点の東側のpass数 | 83 |
| 7 | 棄却pass数 | 31 |
| 8 | 75˚より高角のpass数 | 9 |
| 9 | 15˚より低角のpass数 | 4 |
| 10 | 非対称または不十分なデータ数 | 18 |
| Table 1b. Error statistics | ||||
| Estimate of Variance-Covariance | Standard | |||
| Matrix (m) | Deviation | |||
| Latitude | Longitude | Height | (m) | |
| Latitude | 0.0361 | 0.0041 | -0.0118 | 0.19 |
| Longitude | 0.0041 | 0.0676 | 0.0084 | 0.26 |
| Height | -0.0118 | 0.0084 | 0.0553 | 0.24 |
3.2 WGS84楕円体位置への変換
1980年代後期、放送暦と精密暦による測位結果の違いについては、Defense Mapping Agency (DMA)の変換公式(Defense Mapping Agency, 1987, p.7-7)により World Geodetic System 1984 (WGS84)座標系へ変換後、評価するのが常道であった。その変換補正項は
ΔØ" = 4.5 cosØ / a sin 1" + Δf sin 2Ø/ sin 1" (3-1)
Δλ" = 0.554 (3-2)
ΔHm = 4.5 sin Ø + aΔf sin2Ø -Δa + Δr (3-3)
であり、NWL―10D楕円体とWGS84楕円体(a = 6378137 m, f = 1/298.257)の定数の差を用いれば、(3)式においてa = 6378135 m, Δa = 2.0 m, Δr = 1.4 m, Δf = 0.3121057 x 10-7, Ø = -70˚27'15.376"を代入して
ΔØ" = 0.045, Δλ" = 0.554, ΔHm = -4.66 (4)
という補正項を得て、その結果、JMR アンテナ位相中心のWGS84楕円体上での最終的な位置座標は
Ø0 = 70˚27'15.421"S, λ0 = 23˚53'22.216"E, H0 = 186.00 m (5)
となった。
(5)式による位置は精密暦を用いて求めたWGS84座標位置と±2 mの精度で一致すると言われており(DMA, 1987, p. 8-2)、精密暦による楕円体高の決定精度は±2 m~±3 mなので(DMA, 1987, p. 7-2)、(5)式H0の絶対精度は±4 m~±5 mであろう。
3.3 GPS相対測位
2.の原理の項で述べたように、用いたGPS受信機はL1一波長(C/A code)、4 channel parallel trackingのSONY GTT-3000であった。L0 point近くに設置したGPSアンテナ(pseudo-L0 pointと呼ぶ; photo 3)としらせ船上のGPSアンテナ(S point; photo 4)間の基線ベクトル![]() は
は![]() と同一ではないが、高度差h を求めるにあたってその違いがもたらす誤差は無視しうる量である。
と同一ではないが、高度差h を求めるにあたってその違いがもたらす誤差は無視しうる量である。
 |
 |
| (左)photo 3. 写真用三脚にGPS アンテナを取り付けた(pseudo L0 point)。受信後、このポイントに竹竿を設置し、photo 2のマーカーとした。(右)photo 4. ウィンチ・スタンド突端に見える白い円筒状のものがphoto 3と同じGPSアンテナである。 | |
S point, pseudo-L0 pointに設置したSONY GTT-3000(photo 3ラック上段の右側)からの出力はpre-amplifierを介して50 m 同軸ケーブルで延長し、TEAC MT2GPデジタルカセット(photo 3ラック上段の左側)に記録した。IEEE-488インターフェイスを介して記録されるデータは、4つのSVについての衛星軌道暦、発振時刻、受信時刻及び搬送波位相である。TEAC MT2GPにはROMベースのプログラムで、ASCII-hexadecimal 受信データを934 byte blockで10秒ごとに1時間、無保守で書きだせるようにした。Pseudo-L0 pointでは24V バッテリー及びDC/AC インバーター(photo 3ラック下段)も必要なので、仕組みとしては大がかりになったが、ラックは2人で搬送、1人で設置・起動が可能であった。
GPS同時受信は1986年12月23日,1730UTから1840UTにかけて実施した。その結果、 (I) 1732-1755UTにかけてSV3, 6, 9, 12からの105 epoch,及び (II) 1810-1834UTにかけてSV3, 6, 11, 12からの105 epochという2つのデータセットが得られた。SV9からSV11への変更はPDOP = 4~6になる衛星配置をGTT-3000が自動選択することで実現した。この時期、4衛星が1時間以上同時に見える時間帯は限定されていて、チャンスは1日だけであった。
基線解 ![]() は以下のように求められる (Shibuya et al., 1990)。
は以下のように求められる (Shibuya et al., 1990)。
![]() (6)
(6)
ここで、[SL(ti)] -1 は時刻ti のとき2つの受信器アンテナから4つのSVにむかう単位ベクトルで構成される3 行3列の行列で![]() = (dx0, dy0, dz0)t は求めるべき基線ベクトル(tは転置を示す)、
= (dx0, dy0, dz0)t は求めるべき基線ベクトル(tは転置を示す)、![]() は衛星運動の補正後にepoch ti における各受信器での受信時刻に対して測定された二重位相差を要素とするベクトル、p はepochの数である。(6)式では{ }の第二項による搬送波波長λの整数倍のあいまいさ(ambiguity)が避けがたく、
は衛星運動の補正後にepoch ti における各受信器での受信時刻に対して測定された二重位相差を要素とするベクトル、p はepochの数である。(6)式では{ }の第二項による搬送波波長λの整数倍のあいまいさ(ambiguity)が避けがたく、![]() = (l0, m0, n0)t は基線長の時間変化σ2 が最小になるという制約条件で決定される整数の波数解(l0, m0, n0)で決まるベクトルである。
= (l0, m0, n0)t は基線長の時間変化σ2 が最小になるという制約条件で決定される整数の波数解(l0, m0, n0)で決まるベクトルである。
Table 2が解析結果である。解消されなかったambiguityのせいか、case IとIIでは基線ベクトル各成分の差分に~0.1-0.4 mのoffsetが残り、基線長でも0.4 m,varianceでは3-5 cmの相違が残った。なお、2014年現在ではベルン大学Bernese, JPLのGIPSY OASYS PPP, MITのGAMITなど受信機に依存しない汎用GPS解析ソフトが充実しており、(6)式のようなGTT-3000固有の原始的解法を使うことは、もはやない。
Table 2. Summary of GPS relative positioning results between pseudo-L0 point and S point by the doubly differenced phase method |
|||||
| Case | dx0 (m) | dy0 (m) | dz0 (m) | d (m) | σ2 (m2) |
| I | 26142.4972 | 6905.2436 | 9719.6407 | 28732.9769 | 0.002637 |
| II | 26142.0817 | 6905.0379 | 9719.7984 | 28732.6028 | 0.000951 |
*(l0, m0, n0)の数値そのものには重要性がないので、ここでは省いた。 |
|||||
GPSの基準座標系は1987年1月7日以降、WGS72系(Seppelin, 1974)からWGS84系(DMA, 1987)に変更になった。我々のGPS相対測位が実施されたのは1986年12月23日なので、Table 2により得られた解はWGS72系での値である。しかし、座標系定数の違いは座標差分としての基線ベクトル解には殆ど影響しないのでWGS84系での解と見なして差し支えない。また、2つのGPS antenna phase center間の高度差h は![]() によってのみ決まるので、pseudo-L0 pointの座標はJMR antenna phase centerの解で近似して差し支えない。
によってのみ決まるので、pseudo-L0 pointの座標はJMR antenna phase centerの解で近似して差し支えない。
Heiskanen and Moritz (1967)の変換式に従えば(5)式の直交座標値は次の(7)式で表現される。
X0 = 1956932.95, Y0 = 866764.48, Z0 = -5988360.60 (7)
ここでTable 2 case Iを基線ベクトル解とするとpseudo-L0 pointの反対側の点、即ちpseudo-S point (Fig. 2b参照)の座標は
Xs = X0 + dx0 = 1983075.45, Ys = Y0 + dy0 = 873669.72, Zs = Z0 + dz0 = -5978640.96 (8)
であり、ベクトルの始点をL0 pointからpseudo-L0 pointにずらした時の![]() によって決まる仮想的な終点pseudo-S pointの座標を与える。そしてMeade (1982)に与えられているBowringの変換式によれば、(8)式に対応するWGS84楕円体上の測地座標は
によって決まる仮想的な終点pseudo-S pointの座標を与える。そしてMeade (1982)に与えられているBowringの変換式によれば、(8)式に対応するWGS84楕円体上の測地座標は
Øs = 70˚11'58.479"S, λs = 23˚46'35.455"E. Hs = 23.50 m (9)
となる。従って
h = H0 - Hs = 186.00 - 23.50 = 162.50 m (10)
である。
今回のGPS相対測位が特殊な点は、L0 pointが軟らかな雪面上、S pointがゆっくり上下変動している船上に設置されていて、両端点ともに長時間受信が必ずしも決定誤差改善に結びつかないことである。Table 2のcase IIの場合、σ ~3 cmよりむしろ偏差ベクトル解を用いて(8)式を計算し、(9), (10)式を経て高低差h' を求めると162.80 mになることから
Δh = h' - h = 162.80 - 162.50 = 0.30 m (11)
がGPS相対測位に付随した解の不安定さとみなすことができる。
3.4 平均海水面の決定
Aanderaa WLR-7 (Bergen model)というノルウェー製の圧力式水位計を、1986年12月19日、しらせ舷側から200 mの海底に設置した (photo 5, photo 6)。海水が圧力容器に浸入し、12月23日1540UT以降のデータは得られなかったが、それまでの4日間について10 分サンプリングのデータが取得・記録できた。
 |
| photo 5. WLR-7水位計の準備をする海上保安庁水路部(当時)の道田豊隊員。 |
Fig. 3の実線は計測された水位の日変化で、破線はSchwiderski (1980)の調和定数主要9成分(M2, S2, K1, O1, N2, P1, K2, Q1, Mf)を用いて計算した理論水位変化である。横軸が時間軸で、全576 sampleの算術平均値を仮の0 mとしてプロットしている。実測波形の位相が理論曲線に比べ遅れていること、振幅はfactor で約1.6倍大きいことがわかるが、Breid湾のfjord的な海底地形の効果を反映していると思われる。
 |
| Fig. 3. Ocean tide at Breid Bay. Solid curve shows observed tidal variations by the
WLR-7 water level recorder installed at a depth of 200 m. Dashed curve shows
theoretical tide calculated by using nine major constituents of Schwiderski's (1980) cotidal chart. Sea level at the GPS experiment (dashed segment) was separated by s' from the local mean sea level abscissa) with the uncertainty indicated by the shaded range. |
日変化の振幅は約0.4 m/dayの比率で12月19日から23日にかけて減少していて、GPS相対受信の位相安定性にとっては都合良かったが、受信時間帯は最後のdata loggingの2-3時間後(二重矢印で示す)で、潮位変化の最も激しい時なのは不運であった。GPS受信時の予測水位は-0.20 m (破線segment)で不確かさは影をつけた範囲の±0.1 mであろう。従ってFig. 2のs’は-0.20 ±0.1 mである。
3.5 S pointの平均水位からの偏差
しらせ船上のGPSアンテナはヘリコプターの飛行に支障ない場所として指定された後部甲板Iのwinch top (photo 4, ウィンチスタンドの高さ2.38 m)に設置したので、水面までの鉛直偏差を出すためには様々な計測が必要であった(例えばphoto 7)。
 |
 |
| (左)photo 6. 海底へ投入直前のWLR-7水位計。(右)photo 7. S pointの海面までの直距離を計測するために舷の出っ張り高さを計測する福田洋一(京都大学)隊員。 | |
Fig. 4は計測見取り図で、ℓ は2.29 m,そこから海面まで鋼尺で測った距離s は5.28 mであった。左舷から海面までの距離が5.37 m,右舷から海面までの距離が5.19 mなので、sはその平均に一致していた。
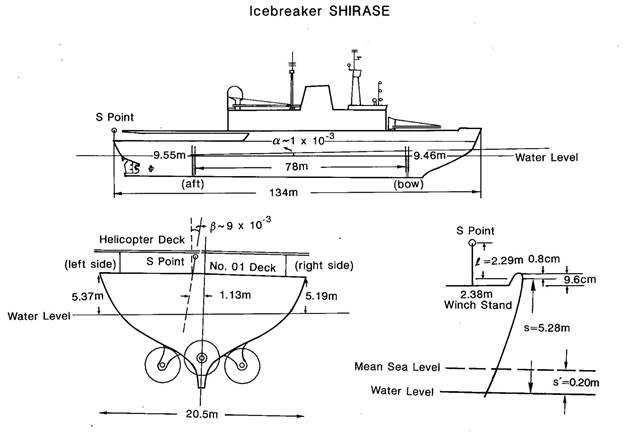 |
| Fig. 4. Location of S point on deck 1 of the Icebreaker Shirase (5002). Pitch and roll angles of Shirase (5002) were negligibly small. |
Fig. 4ではdraft gaugeの読みから推定したGPS受信時のpitch角α,roll 角β も示してあり、それらの値は時間変化したが(ここでは図は省略)、アンテナ位相中心の偏位をもたらす程ではなかった。一方、GPS受信時間帯の1時間での気圧変化は1 hPaであったが、GPS受信12時間前から12時間後にかけては8 hPa徐々に減少した。この気圧変化による s’推定の不確かさは±0.04 mと見込まれる。
以上をまとめると,S pointの平均海面水位からの偏差p は
p = ℓ + s + s’ = 7.37 ±0.3 m (12)
であった。
3.6 L0 pointでのその他の測量
L0 pointにおいてGPS実験(1986.12.18)からsatellite Doppler受信(1987.04.16)までに積もった積雪量は0.33 mであった。GPS実験時,GPSアンテナは雪面から1.63 m上に設置されていて、satellite Doppler受信時JMR アンテナの位相中心は雪面から0.58 m上にあった。従って、両アンテナ位相中心の高低差(Fig. 2におけるr)は
r = 1.63 - (0.58 + 0.33) = 0.72 ±0.03 m (13)
であった。
4. Breid湾での結果と議論
4.1. 得られたGeoid高と誤差
Table 3はGeoid高推定に関わる(1)式の各項の測定量と誤差をまとめたものである。S pointでのWGS84楕円体上での最確値Ns は
Ns = 186.0 -162.5 -7.4 + 0.72 = 16.8 m (14)
と求められる。各測定に付随する誤差量は互いに独立な推定量と見なせるので、標準誤差σNs は
σNs = (42 +0.32 +0.32)1/2 ~ 4 m (15)
で圧倒的に、放送軌道を用いた楕円体高決定に伴う誤差が卓越している。
| Table 3. 観測量と誤差のまとめ | ||||
| Parameter | Estimate | Standard | Error | |
| Deviation | Source | |||
| 楕円体高 | H0 | 186.0 | 4 | 放送軌道4 m |
| 気象遅延0.1 m | ||||
| 高低差 | h | 162.5 | 0.3 | GPS相対測位 |
|
||||
| S pointの海面 | p | 7.4 | 0.3 | 潮汐<0.2 m |
| からの偏差 | 鋼尺測定~0.1 m | |||
| Antenna offset | r | 0.72 | 0.03 | 巻尺 |
| Geoid高 | N | 16.8* | ~4 | overall誤差 |
* WGS84楕円体上での値 |
||||
4.2 Geoid Modelとの比較
DMA (1987)のWGS84 geoid model (n = m = 18 まで)によると、S pointでのモデル値は20.0 mで、得られた実測値はそれより3.2 m低い値である(Fig. 5a参照)。昭和基地で得られている放送暦測位の結果(Shibuya, 1985)をWGS84楕円体上の値に変換するとその結果は21.8 mになりモデル予測値より約4 m小さい。つまり、大局的にはFig. 5aのコンター線を矢印の方向(北東)に3~5 m平行移動したら説明がつくことになる。
1990年当時、n = m = 18より高次のWGS84 geoid model coefficientsは機密事項で、Breid湾付近のlocal/regionalなgeoidの特性を知るためには250次までの展開係数を持つOSU-86D geoid model (Rapp and Cruz, 1986)と比較するのが適切であった。しかし、その結果はFig. 5bのように、昭和基地についてのground dataは3 mモデルより小さい、S pointについては偏差が8 mに拡大するというものであった。
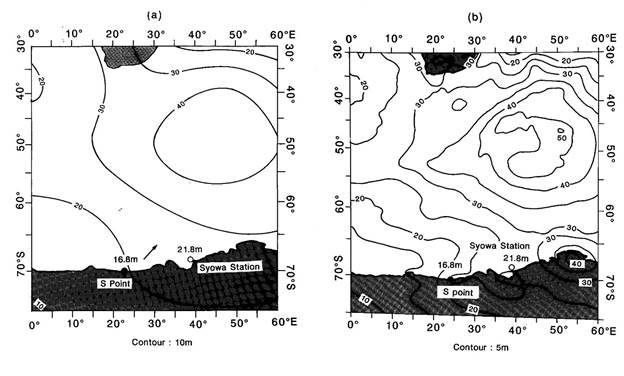 |
| Fig. 5. (a) Ground data of geoid height at S point and Syowa Station on the WGS84 (n = m = 18 truncation) geoid contours by DMA (1987) and (b) those on the OSU-86D geoid contours by Rapp and Cruz (1986). |
5. その後に向けて
S pointは基準点マークとしてはBreid湾に残らないので、L0 pointから約90 km南にある露岩であるシール岩に何らかの形で取り付けない限り、基準点としての役割は果たせない。このためにはシール岩までの標高、重力測定なども必要になるが、Radar/Laser高度計の地上検証の役割もあるので、これについては別ノートで記述する。
参考文献
Brown, D.C., Trotter, J.E., 1973. Extensions to SAGA for the geodetic reduction of Doppler
operations. Doc. AFCRL-TR-73-0117, 1-53, Air Force Cambridge Res. Lab., Bedford, Mass.
Defense Mapping Agency, 1987. Department of Defense World Geodetic System 1984: Its
definition and relationship with local geodetic systems, DMA Tech. Rep. 8350.2, 110 pp.,
Washington, D. C.
Fujita, M., Iga, A., Okita, T., 1987. Design of the GPS interferometer, paper presented at the
International Union of Geodesy and Geophysics (IUGG) XIX General Assembly,
Vancouver, B. C.
Heiskanen, W.A., Moritz, H., 1967. Physical Geodesy, 364 pp., W. H. Freeman, New York.
JMR Instruments Inc., 1982. SP-2G satellite positioning program, JMR Doc., 2003505-8, 16
pp., Catsworth, Calif.
Kumar, M., 1982. An unbiased analysis of Doppler coordinate systems, paper presented at
the Third International Geodetic Symposium on Satellite Doppler Positioning, Def.
Mapp., Agency, Las Cruces, N. M., Feb. 8-12.
Lerch, F.J., Putney, B.H., Wagner, C.A., Klosko, S.M., 1981. Goddard earth models for
oceanographic applications (GEM10B and 10C), Mar. Geod., 5, 145-187.
Meade, B.K., 1982. NWL-10F versus WGS-72 Doppler results and broadcast versus precise
ephemeris coordinates, paper presented at the Third International Geodetic
Symposium on Satellite Doppler Positioning, Def. Mapp., Agency, Las Cruces, N. M.,
Feb. 8-12.
Rapp, R.H., Cruz, J.Y., 1986. The representation of the Earth’s gravitational potential in a
spherical harmonic expansion to degree 250. Rep. 373, 64 pp., Dep. Geod. Sci. Surv.,
Ohio State Univ., Columbus.
Schwiderski, E.W., 1980. On charting global ocean tides, Rev. Geophys., 18, 243-268.
Seppelin, T.O., 1974. The Department of Defense World Geodetic System 1972, paper
presented at the International Symposium on Problems Related to the Redefinition of
North America Geodetic Networks, Def. Mapp., Agency, Fredericton, N. B., Canada,
May 20-25.
Shibuya, K., 1985. Performance experiment of an NNSS positioning in and around Syowa
Station, East Antarctica, J. Phys. Earth, 33, 453-483.
Shibuya, K., Fukuda, Y., Michida, Y., 1989. Installation of geoid height control station on
Antarctica, paper presented at the Fifth International Geodetic Symposium on Satellite
Positioning, Def. Mapp., Agency, Las Cruces, N. M., Mar. 13-17.
Shibuya, K., Fukuda, Y., Michida, Y., 1990. Application of GPS relative positioning for
height determination above sea level in the Antarctic marinal ice zone, J. Phys. Earth,
38, 149-162.
Shibuya, K., Fukuda, Y., Michida, Y., 1991. Determination of geoid height at Breid Bay,
East Antarctica, J. Geophys. Res., 96, 18285-18294.
Q and A
Q1: NWL-8E, NWL-10D, WGS72, WGS84などいろいろな座標系がでてきて、何が何だか判りません。これらはいかなる関係にあるのですか?
A1: NWLもWGSもアメリカ海軍の航法支援機関の名前で、人工衛星を利用した船、飛行機の位置決定を行っていました。8E, 10D, 72, 84などはそれらのモデルバージョン名で、数字が大きくなるほど新しくなっています。1990年代はsatellite DopplerからGPSへ位置決定システムが更新されていった時代ですが、改良の要点はZ-shift((3)式あるいは(4)式に見られる大きな補正値ΔHm)の解消にありました。人工衛星の運動は地球の重心を中心とする直交座標系で記述されますが、地球の重心がどこにあるかは、自明ではありません。歴史的に見ると、地球楕円体中心を直交座標系の地球重心に一致させようとすると、楕円体がどうしても4-5m,北方へ偏ってしまうことが問題でした。この偏りはWGS72, NWL-10Dなどを経て、WGS84系とそれに付随するWGS84楕円体の導入で解消し、直交座標系―測地座標系変換が、ほぼ矛盾なくいつでもどこでも1 m以内で正しく行えるようになりました。2010年代の今は、WGS84とさらに進化したITRF (International Terrestrial Reference Frame)座標系が理解できれば、後は知らなくても困りません。
Q2: Geoid高決定の原理は理解できるのですが、必要な手間が多く、効率的でないのが気になります。
A2: 楕円体高の決定はGPS解析の進歩で、1日あれば精度よく(10 cmより良く)決められます。標高差もGPS相対測定(GPS levelingと呼ばれます)を繰り返すことでnear real-timeで実施できます。問題は基準点の海抜高度取り付けです。0.1 m精度で平均海水面位置を決定するためには基準点近くの海域で出来るだけ長期間海洋潮汐観測する必要があります。南極氷縁域での海面位置決定は潮汐モデルがあれば代用できる、という訳ではなく必ず実測が必要で、手間は簡単になりましたが時間はやはりかかります。測地学の精度はこうした努力を一歩ずつ重ねることにより上がって行きます。