南極地球物理学ノートNo. 27 (2014.01.30)
JA98*実験データの相関処理と基線長解析
寺家孝明・渋谷和雄
キーワード:FX相関器、S2-K4変換、JA98実験、測地パラメータ推定
1. 第39次隊が実施したVLBI実験
南極地球物理学ノートNo. 26で述べたように、夏隊でJA981a (1998/02/09-02/10)とJA981b (1998/02/10-02/11)という2つの24hr実験K4データを持ちかえることができた。しらせの日本帰港は4月12日で、オーストラリア、南アフリカが送ってきたS2データと合わせ、国立天文台・三鷹相関局で相関処理が始まったのは5月である。昭和基地では、その結果が判らないまま、5月11日の実験(JA982a, b)を準備し、日本とのやりとりで不具合があるらしいと判った後も、さらに手探りでまた次の実験(JA983)を行うという綱渡りを強いられた。第39次隊で実施した6回の実験はTable 1にまとめられる。
| Table 1. 第39次隊が実施した南極VLBI実験一覧 |
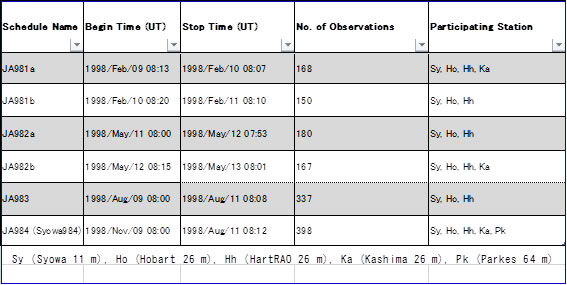 |
* 基本的な実験構成局はSy, Ho, Hhであるが、必要に応じてKa, Pkが参加した。 |
2. オーストラリア、南アフリカのS2システムとの互換性
日本の測地VLBIシステムはK4と呼ばれ、NASAのCrustal Dynamics Project (CDP; [1], 南極地球物理学ノートNo. 3参照)が使用していたMark IIIとは親和性が良く、ともにXFという相関方式を用いていた。一方、オーストラリアも南アフリカも天文ベースのFXという方式になじんでいて、しかも、S2というカナダ製のシステム(Cannon et al., 1997 [2])にこだわりがあった。S2はvideo samplerからの各baseband出力14ラインをRS232/RS485シリアル制御で市販のビデオカセットに送り記録する。従って、K4が用いているSONY DIR1000のD1カセットにデータフォーマト変換してテープコピーしないと相関処理ができない。両システムの詳細は省くが、記録媒体に違いがあっても、互換性(compatibility)が取りやすいデータ構成で記録することが要点であった。国立天文台は当時、VLBI Space Observing Project (VSOP; [2]) を推進していて、その必要性から天文用のS2-K4コピー機も完成し、まさに、S2―K4データ間での相関処理システム開発の最終段階にあったので、昭和VLBI実験はそれに相乗りし、(1) S2局に特注のvideo sampler(カナダ製)を送りその出力形式で記録してもらう、(2) 昭和側のformatter DFC-1100の次段にVSC7210というS2時系制御装置を入れてその時系出力もDIR1000に記録させフォーマト変換する、ことで円滑な相関処理を可能にしようと考えた。Fig. 1(二点鎖線の右側)がそのための昭和側バックエンド構成図である。
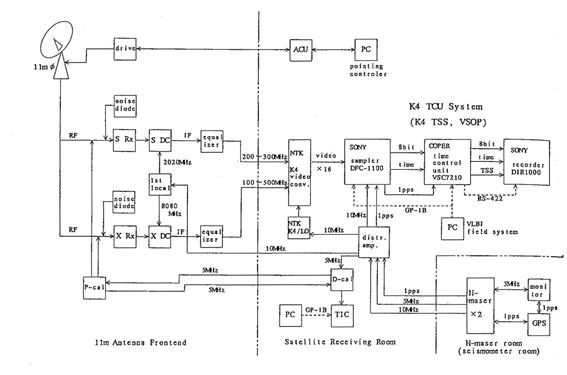 |
| Fig. 1. S2データと相関を取れるようにするために、K4 sampler (DFC-1100)の次段にTime Control Unit (TCU; VSC7210)を配し、データにTSSIDという一種の時刻スタンプを付加してDIR1000で磁気テープ(D1)記録させる必要があった。 |
3. X帯のフリンジがでない
JA981aとJA981bデータを1998年5月、三鷹相関局が処理したところ、S2-S2局間ではS, X帯共に相関が取れたのに、K4-S2局間ではS帯のフリンジは求められた(Fig.2)がX帯では確認できないという困った事態が起きた。我々(寺家、渋谷)はともに昭和基地に滞在中であり、日本と連絡を取って原因調査を重ねた。
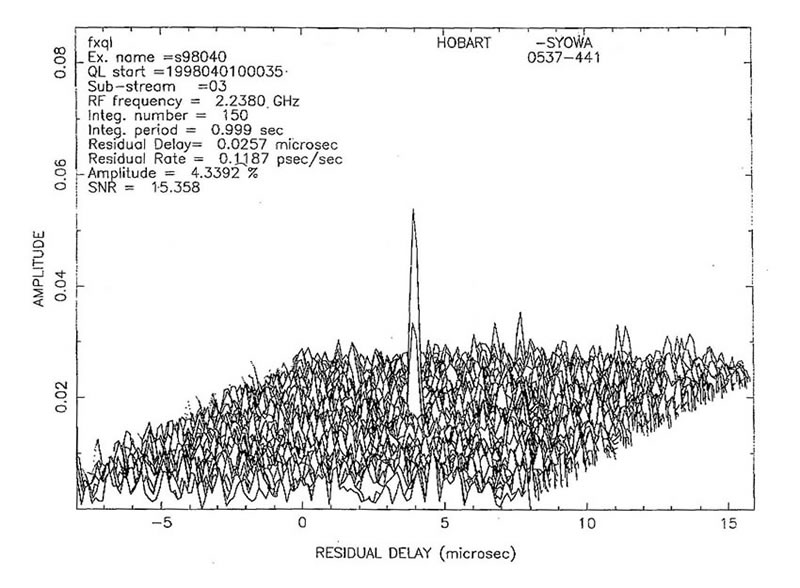 |
Fig. 2. 1998年7月15日、Syowa981実験の相関処理結果がFaxで送られてきた。S-bandについては、尤もらしいdelay timeとfringe rateの組み合わせで相関振幅にピークが現れたが、X-bandではピークが得られなかった。X-bandでフリンジピークが出ないと、時間分解能が不足するので、望むべき決定精度(数cm)の測地解には至らない。 |
3.1. アンテナ電気軸較正係数が正しくない?
昭和基地側ではAz-El軸の非直交度、方位角原点の誤差、高度角原点の誤差など、与えたアンテナ電気軸較正係数と呼ばれる7つの角度パラメータが正しくないのではないか、という点が疑われた。同じ電波星であっても周波数の高いX帯では電波源の大きさがS帯に比べ小さい可能性があり、antenna pointing精度が不足していると電波源を捕捉できない可能性がある。そこで、1998年9月にOri-Aという天球位置の良くわかっている電波星を5点法と呼ばれる方法で正しく追尾できるかどうか確認した(Fig. 3)。これはある時刻について正しいとされるAzimuth, Elevationに対して角度をそれぞれ±1度ずらしてアンテナを向けた時、電波星の受信電波強度が下がり、正しい方向を向いた時また受信電波強度が回復する、そしてスケジュール追尾を続ければ、予測された受信強度が保てることの再確認である。求められた較正係数はTable 2で、第30次隊の使用した表、1997年12月―1998年の設置時の表の値とほぼ同一で、問題はなかった。
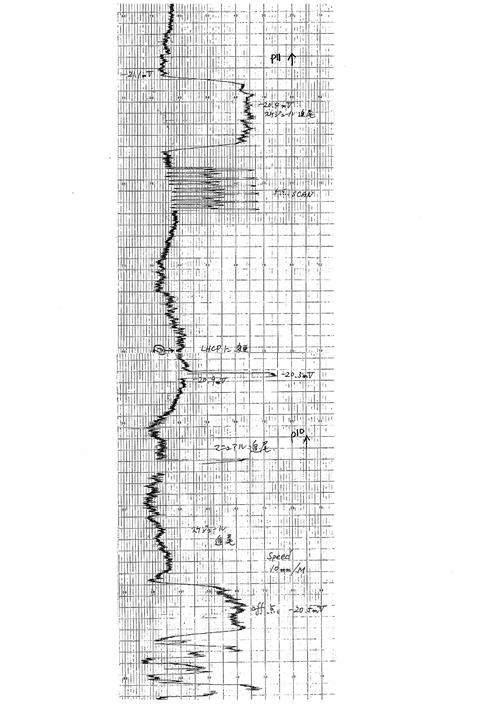 |
| Fig.3. antenna pointing testの概要を示すペンレコーダー記録の例。Fig. 1 の二点鎖線左側(フロントエンド)でNoise DiodeをONすると、電波の受信レベルがマイナス側(例えは-20.3 mVから-20.9 mVへ)に全体としてシフトする。さらにNoise Diode ONのままElevationが正しい方向から+1°あるいは-1°はずれると、受信レベルが低下する。Azimuthについても同様で、正しいElevation, Azimuthの場合にのみ受信レベルが保たれ、時間経過とともに感度が低下しなければ、正しくtrackingしていることになる。 |
| Table 2. 昭和基地アンテナ電気軸補正係数 |
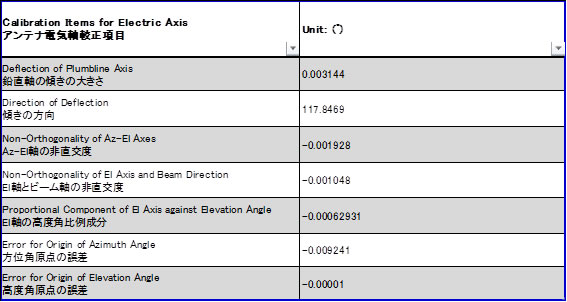 |
どのようなアンテナであれ、設計通りの理想的な設置施工は実現しないので、例えば鉛直軸の傾きとその方向など、補正係数7項目を現場測定で決める必要がある。Table 2の7項目が得られた補正値で、その補正値を考慮したpointing (Az, El角度)時系列を与える必要があった。
3.2. X帯のシステム雑音温度が高い?
スペクトル帯域とレベルの判っている信号をLNAに注入し、Down Converter, Line Equalizerを通し、80 mケーブルで送った後、測定ポイントでSpectrum Analyzer測定してシステム雑音を求めた(Fig. 1の2点鎖線左側のアンテナ・フロントエンド図参照)。Fig. 4はその時のX-band systemのスペクトル図で、雑音温度換算でX帯(8350 MHz)では117.5K(一方、S帯(2260 MHz)では69.2K)で、特に異常は見られなかった。しかし、2月時の5点pointing test中には天体信号が必要感度にならないほど、X帯の雑音レベルが極端に上がったことがあった(寺家隊員メモ)ということなので、疑いは残った。
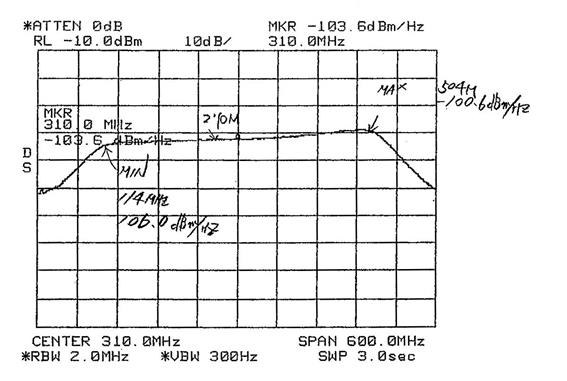 |
| Fig.4. 8350 MHz --> 270 MHzスポットでのスぺアナ測定結果。測定値は-103.6 dB/Hzだがケーブルロス0.5 dBを考慮すると-103.6 + 0.5 = -103.1 dB/Hzが計測値となる。トータルゲインは74.8 dBなので、システム雑音は-103.1 ― 74.8 = -177.9 dB/Hzに対応した117.5Kになる。これは簡便法による結果で、強度の判っている天体電波の受信強度から計算する方法もある。 |
3.3. X帯の偏波選択を間違えていた?
昭和基地アンテナはリモートセンシング衛星受信時には左旋円偏波(LHCP)を受信している。VLBIは右旋円偏波(RHCP)を用いる「決まり」であるが、切り替え忘れだろうか?絶対なかったとは言い切れないので、2月事件後、チェックシートで念には念を入れた。
4. レコーダーが原因か?
トラブルシュートは第39次隊が予定した最後(11月9日)のSyowa984(JA984)実験直前の10月末まで続いた。S, X帯に限らないオペ上全般の注意点には環境要因による機器の不具合がある。アンテナ上部機器室内が低温外気で下がりすぎると、受信機系エレクトロニクスが動作異常を起こしやすい。3章のX帯異常の再現条件は結局、最後まで判らなかったが、2月以後、温度監視は重要なチェック項目になった。
次に、昭和基地はいつでも低湿度であり、空気中の埃(風化した花崗岩の雲母がきらきら舞っているのが見える)が帯電しやすい。そのため、電子機器類のショートに注意が必要である。また、磁気テープなど磁性体に対して埃が集まりやすくなるので、記録装置の磁気ヘッドが汚れて記録品質が急激に低下する可能性にも、注意が必要であった。
実際、記録テープ持ち帰り後のフリンジ相関処理星取り表(Table 3)によると5月実験(JA982a, JA982b)、8月実験(JA983)ともにDIR1000が「エラーレートが悪い」という警告を頻繁に発していて、昭和テープへのID書き込みがうまく行かなかったことがうかがえる。磁気テープには9027 μsごとにIDというヘッダー番号が書き込まれ、このID番号の対応付けで両局間のデータ時間軸を揃えることができるが、これが揃わない(IDシンクロが取れない)と、フリンジ相関が取れない。
| Table 3. 三鷹相関局でのフリンジ相関処理成否星取り表 |
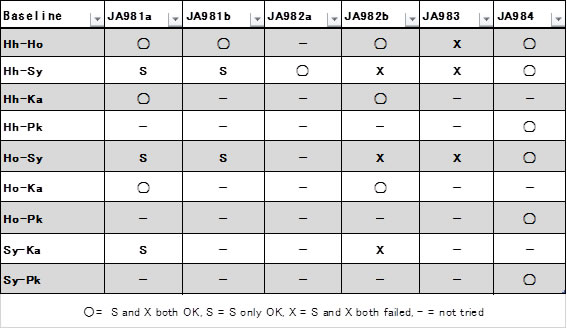 |
結局、生き残ったのは11月のSyowa984(JA984)実験だけであった。しかし、1998年9月段階で、DIR1000レコーダーヘッドのごみ詰まり除去・分解クリーニング、記録D1テープのクリーニング操作を念入りに行ったことが実験の成功に結びついている。
5. FX相関処理と遅延計測
5.1. 相関処理方法
JARE-39によって行われた昭和実験のHobart, HartRAO観測データは三鷹FX相関局でS2フォーマットからK4フォーマットへデータ変換され、テープコピーされた。FX相関とは干渉計で行われる相関処理方法の1形式であり、初めに局ごとのデータを時系列データから周波数系列データに変換し、それからデータ間の相関を取る方法である(Shibata et al., 1998 [4])。
先ず、データ同期再生の基準となる時計は地球の中心に置かれた仮想的なものとする。電波星から地球または太陽系に降り注ぐ電波は平面波とみなし、地球中心での時刻t0 において、地球中心を通過した電波の波面が地上のX局とY局をそれぞれ通過した時刻tx , ty を、
![]() ,
, ![]() (1)
(1)
で表す。![]() ,
, ![]() はそれぞれt0 時における局ベース遅延と呼ばれる。
はそれぞれt0 時における局ベース遅延と呼ばれる。
相関処理のプロセスでは、先ず、其々X局とY局のテープから再生されたデータストリームの中で、基準時刻t0 に対してX局がτx 、そしてY局ではτy の遅延時間予測値分だけ読み取り部分をずらして(遅延トラッキングと呼ばれる)、ある一定の時間幅の時系列データを取り出し、それぞれチャンネル帯域幅でフーリエ変換(FFT)し、複素スペクトルデータとする。次に、X, Y局の周波数ƒ での複素スペクトルデータ ![]() ,
, ![]() 其々に、
其々に、
![]() ,
, ![]() (2)
(2)
![]() : X局のLocal周波数、
: X局のLocal周波数、 ![]() : Y局のLocal周波数
: Y局のLocal周波数
の位相回転(フリンジ回転)を加える。最後に、この一連の補正(フリンジストッピング)が施された対の複素スペクトルデータ間で積算を行う。
![]() (3)
(3)
この、![]() はクロススペクトルと呼ばれ、FX相関器はこのクロススペクトルを一定時間間隔と一定周波数間隔で離散的な複素データとして出力する。
はクロススペクトルと呼ばれ、FX相関器はこのクロススペクトルを一定時間間隔と一定周波数間隔で離散的な複素データとして出力する。
5.2. 遅延時間計測
測地VLBIに用いられる観測量は遅延時間である。これは電波の波面が観測局X, Yの基準点を通過した時刻の差で表される。三鷹FX相関器の相関データから得られる基線ベースでの遅延時間τg は、地球中心時刻τ0 において、フリンジトラッキングに使われた局ベース遅延予測値から、
![]() (4)
(4)
と表され、また、遅延変化率![]() は其々の局ベース遅延予測値の変化率から、
は其々の局ベース遅延予測値の変化率から、
![]() (5)
(5)
と表される。遅延時間計測から得られる解は、基線ベースでの遅延時間と遅延時間変化率のそれぞれの予測値に対する補正項⊿τ と![]() である。受信された信号は白色雑音に極めて近い連続波であり、この補正項が正しいときのみ波形がそれぞれの周波数で一致して相関係数が1に近い値になり、補正項が正しくないときには相関係数が0に近い値になるという性質がある(Fig. 2参照)
である。受信された信号は白色雑音に極めて近い連続波であり、この補正項が正しいときのみ波形がそれぞれの周波数で一致して相関係数が1に近い値になり、補正項が正しくないときには相関係数が0に近い値になるという性質がある(Fig. 2参照)
三鷹FX相関器から出力された相互スペクトルから遅延時間を得るには、相互スペクトルから電波星の信号の観測周波数ƒ の時のフリンジ位相⊿ψとその時間変化率であるフリンジレート![]() を得るためのプロセスを用いる。ここでフリンジ位相は、
を得るためのプロセスを用いる。ここでフリンジ位相は、
![]() (6)
(6)
また、フリンジレートは、
![]() (6)’
(6)’
と表される。
VLBI観測から得られる信号のフリンジ位相は雑音の中に埋もれているので、これを取り出すには、周波数方向と時間方向に積分を行う。その際、⊿τ と![]() が正しい遅延時間補正量の時にのみ、遅延とフリンジ位相の関係、群遅延
が正しい遅延時間補正量の時にのみ、遅延とフリンジ位相の関係、群遅延![]() とその時間変化率
とその時間変化率![]() から、周波数方向と時間方向に積分した際のフリンジ位相の絶対値(=フリンジ強度)が0にならずにある一定の値を保つ性質を利用する。
から、周波数方向と時間方向に積分した際のフリンジ位相の絶対値(=フリンジ強度)が0にならずにある一定の値を保つ性質を利用する。
周波数-時間平面に相互スペクトルが分布する時、周波数ƒ 、時刻t における相互スペクトル内部のフリンジ位相![]() と単位周波数差⊿ƒ 及び単位時間差⊿t 離れた場所にあるフリンジ位相
と単位周波数差⊿ƒ 及び単位時間差⊿t 離れた場所にあるフリンジ位相![]() との関係は、⊿τ と
との関係は、⊿τ と![]() により、
により、
![]() (7)
(7)
で表される。この式から、ƒ 0 ,t0 を原点とする周波数-時間平面に⊿ƒ ,⊿t 毎にm× n個の離散的に分布する相互スペクトルからフリンジ位相![]() を得るための積分式は、
を得るための積分式は、
![]() (8)
(8)
となる。この計算を⊿τ と![]() をスイープさせながら実行し、
をスイープさせながら実行し、![]() が最大値をとる⊿τ と
が最大値をとる⊿τ と![]() を、遅延時間の解としている。
を、遅延時間の解としている。
5.3. 時系変換
遅延推定から得られた遅延時間観測値![]() は、地球中心に時計を仮想的に置いた場合に、XY局間でフリンジとして検出された電波の波面が地球中心に到達した時刻をt0として、その時刻におけるX局とY局其々に同一波面が到達した時間差(地球中心時刻系における基線ベース遅延)である。一方、局位置や地球回転の推定を行う測地解析の際に用いられる遅延は基線XYのX局に在る時計を基準として、電波の波面がX局に到達した時刻におけるX局とY局に同一波面が到達した時間差(局時刻系における基線ベース遅延)として表される。従って、解析の前に遅延に対する時刻系の変換が必要になる。
は、地球中心に時計を仮想的に置いた場合に、XY局間でフリンジとして検出された電波の波面が地球中心に到達した時刻をt0として、その時刻におけるX局とY局其々に同一波面が到達した時間差(地球中心時刻系における基線ベース遅延)である。一方、局位置や地球回転の推定を行う測地解析の際に用いられる遅延は基線XYのX局に在る時計を基準として、電波の波面がX局に到達した時刻におけるX局とY局に同一波面が到達した時間差(局時刻系における基線ベース遅延)として表される。従って、解析の前に遅延に対する時刻系の変換が必要になる。
地球中心時刻系における遅延から局時刻系における遅延への変換は、以下のように行う。先ず、遅延はX局とY局の間の光行差であり、時空に対する不変量とみなす。この光行差の計測に用いる時計の設置場所(時刻系の中心)を移動させる。時計の在る場所によって時刻系は異なるので、時刻系間の時間差と歩度差に応じて遅延に付帯する時刻が変化する。具体的には、FX相関器から得られた遅延は地球中心に時計が置かれており、この時計を地上のX局に持っていく際に時刻系間の時刻差を修正する作業が必要である。
VLBIの観測で用いる時刻系はTAI(原子時)若しくはUTC(国際協定時)であり、FX相関器から出力されるデータに付帯する時刻もUTCで表される。対して、地球中心に時計を持ってきた場合、その時計はTCG(地球中心座標時)で表される。また、観測量である光行差は太陽系の各天体の配置に依って変化する重力場の影響を考慮するために時刻系の中心を太陽系重心に移動し、TCB(太陽系重心座標時)上で計算される。
従って、地球中心にてTAIで表された時刻![]() での遅延
での遅延![]() を時刻変換前の観測量とすると、時刻系は、
を時刻変換前の観測量とすると、時刻系は、
![]() (9)
(9)
というシーケンスを経て変換される。
![]() 時の地球中心とX局との間の局ベース遅延
時の地球中心とX局との間の局ベース遅延![]() を計算し、
を計算し、![]() 時に地球中心に到達した電波がX局に電波が到達した時刻は、
時に地球中心に到達した電波がX局に電波が到達した時刻は、
![]() (10)
(10)
となる。逆に![]() をTAI時刻系に戻すには、
をTAI時刻系に戻すには、
![]() (11)
(11)
の順に変換を行う。
この一連のシーケンスを経て、局時刻系の基線ベース遅延![]() が得られる。其々の時刻系間の変換項は、時刻系間の相対運動による歩度の差を計算し、元期からの歩度の差の累積で表す。厳密な変換を行う際は、TCBとTCGとの差に地球の太陽系重心に対する公転運動による周期項を考慮することも必要である。時刻系間の接続方法についての最新のプロセスは、IERS Conventions(IERS Technical Note No. 36)のPetit and Luzum (2010 [5])に記載されている。
が得られる。其々の時刻系間の変換項は、時刻系間の相対運動による歩度の差を計算し、元期からの歩度の差の累積で表す。厳密な変換を行う際は、TCBとTCGとの差に地球の太陽系重心に対する公転運動による周期項を考慮することも必要である。時刻系間の接続方法についての最新のプロセスは、IERS Conventions(IERS Technical Note No. 36)のPetit and Luzum (2010 [5])に記載されている。
5.4. 測地パラメータ推定
測地パラメータ推定は時間方向に並べられた遅延時間から、VLBI観測局の地球基準座標系上での位置、地球回転パラメータ、等を推定する事である。遅延観測値を構成する主成分は以下の様に表される。
![]() (12)
(12)
![]()
![]()
Q : 歳差・章動, S : 恒星時回転, W : 極運動, c : 光速,
![]() : X, Y局の準拠楕円体上での座標,
: X, Y局の準拠楕円体上での座標, ![]() : 地球の変形によるX, Y局の変位量,
: 地球の変形によるX, Y局の変位量,
![]() : 電波星の天球座標系上の方向,
: 電波星の天球座標系上の方向, ![]() : 電波星の輝度中心の方向の変化、構造効果,
: 電波星の輝度中心の方向の変化、構造効果,
![]() : X, Y局の大気遅延のマッピング関数,
: X, Y局の大気遅延のマッピング関数,
![]() : X, Y局の天頂大気遅延,
: X, Y局の天頂大気遅延,
![]() : X, Y局のクロックオフセット,
: X, Y局のクロックオフセット,
![]() : 遅延観測値の熱雑音誤差
: 遅延観測値の熱雑音誤差
 |
||
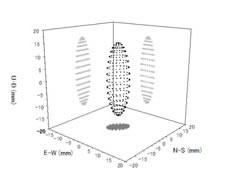
| Fig. 5. 1998年11月11日の昭和実験で得られた昭和基地VLBI基準点座標の誤差分布。水平方向にくらべ、鉛直方向の誤差が2-3倍大きい。 |
この遅延観測値の成分の中から、局位置、天体位置、地球回転パラメータ、天頂大気遅延の時間変化多項式、クロックオフセット多項式、等のパラメータが求められ、最少二乗法等の統計解析により誤差(Fig. 5参照)が推定される。
Syowa984実験の遅延観測値から、国立天文台で開発されたVLBI解析ソフトウェア(calc/msolv [Manabe et al., 1991 [6])を用いて、推定された昭和基地VLBI基準点(多目的アンテナのAz-El交点)の座標は
![]()
![]() (13)
(13)
![]()
であった(Jike et al., 2005 [7])。他の参加局の局座標値は割愛するが、各局間の基線長はFig. 6のように求められた。
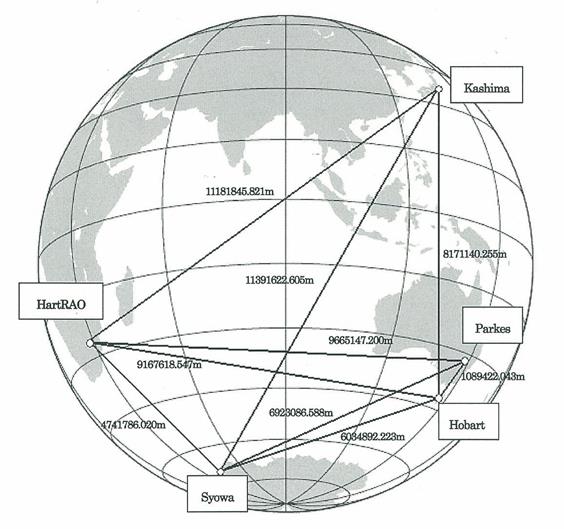 |
| Fig.6. Syowa984実験の解析結果から得られた各局間の基線長。Syowa-Hobart(南極―オーストラリア・プレート間), Syowa-HartRAO(南極―アフリカ・プレート間)などの実測解が初めて得られた |
6. FX相関器のVLBI測地解析への利用
FX相関器出力で得られる遅延量を用いたVLBI測地解析法は、1998~2000年当時、まだ開発途上で、Syowa984実験が実質上、その最初の適用例であった。そして、この解析法の完成度を高め、国立天文台が実施するVERAプロジェクト (VLBI Exploration for Radio Astrometry project, 2004~(Kobayashi et al., 2008 [8])の中で、利用することになった。VERAは相対位相VLBI観測により大気の揺らぎによる位相乱れを相殺する方法を使って、二つの天体の相対離角を10 マイクロ秒角レベルの精度で測定する。銀河系内天体の天球面上で近傍(最大2°離角)のQSOに対する相対離角の変化から、銀河系内天体の年周視差と固有運動を得て、銀河系の構造や内部運動を明らかにする観測プロジェクトである。
数10 マイクロ秒角の精度を保証するためにはVERAネットワークを構成するアンテナ間の基線を数mmの精度で監視することが必要であり、VLBI測地観測を定常的に実施している。VERAで実施されたVLBI測地観測のデータは三鷹相関局で相関処理され、相関処理データを基にVERA観測局の局位置推定が今(2013年末現在)では定常的に行われている(Jike et al., 2009 [9])。
本ノートの内容は以下の科研費報告書も参考にしている。antenna pointingについては、既存の多目的衛星アンテナのACU (Antenna Control Unit)とmatchingを取る形でプログラムを組む必要があり、また、衛星追尾プログラムから切り替えて駆動制御する必要があった。この報告書には田村良明による駆動制御プログラムの詳細が掲載されている。
科研費 (基盤研究(C)(2)) 研究成果報告書
平成10-12年度 課題番号10640413
研究代表者:田村良明
南半球のVLBI網と日本列島を結ぶ長大基線による測地実験
参照・文献
[1] http://cddis.nasa.gov/programs.html#CDP
[2] Cannon, W.H., Baer, D., Feil, G., Feil, B., Newby, P., Novikov, A., Dewdney, P.,
Carlson, B., Petrachenko, W.T., Popler, J., Wietfeldt, R.D., 1997. The S2 VLBI
System. http://citeseerx.ist.psu.edu/viewdoc/summary?doi=10.1.1.45.797
[3] http://www.vsop.isas.jaxa.jp/top.html
[4] Shibata, K.M., S. Kameno, M. Inoue, and H. Kobayashi (1998): Mitaka Correlator
for the Space VLBI. Proceedings of IAU Colloquium 164 “Radio Emission from
Galactic and Extragalactic Compact Sources”, ed. J.A. Zensus et al., ASP
Conference Series, 144, 413-415.
[5] http://www.iers.org/nn_11216/IERS/EN/Publications/TechnicalNotes/tn36.html,
IERS Conventions (2010): Chapter 10, IERS
Conventions (2010) eds. by Gerard
Petit and Brian Luzum, IERS.
[6] Manabe, S., K. Yokoyama, S. Sakai (1991): Earth orientation parameters and
celestial and terrestrial reference frames of NAOMIZ
analysis, IERS Technical
Note, 8, 61-64.
[7] Jike, T., Y. Fukuzaki, K. Shibuya, K. Doi, S. Manabe, D.L. Jauncey, G.D. Nicolson,
P.M. McCulloch (2005): The first year of Antarctic
VLBI observations, Polar
Geoscience, No. 18, 26-40.
[8] Kobayashi, H., N. Kawaguchi, S. Manabe, K.M. Shibata, M. Honma, Y. Tamura,
O. Kameya, T. Hirota, T. Jike, H. Imai, T. Omodaka
(2008): Phase referencing VLBI
astrometry observation system: VERA, A Giant Step: from Milli- to Micro-arcsecond
Astrometry,
Proceedings of the International Astronomical Union, IAU Symposium,
248, 148-155
[9] Jike, T., S. Manabe, and Y. Tamura (2009): Result of VERA Internal Geodetic VLBI
with 1 Gigabit-per-second recording in the first
three years, Journal of Geodetic
Society of Japan, Vol. 55(4), 369-384.
Q and A
Q1: MarkIII, K4, S2などいろいろな記録系があるようですが、何故、いろいろあるのですか?無駄ではないですか?
A1: MarkIIIはMIT Haystack研究所が開発したMetrum 9600レコーダーを使用したシステムです。このレコーダーは1インチ幅のテープにtrack (16ある)を替えて、320 inch/sという速さで14インチ径18000 ftのテープに~680 GByteのデータを書きだすことができます。しかし、テープ駆動系の制御に難点があったようです。S2は市販のVHS型ビデオカセット8台を連ねる必要があり、1実験当りに必要なST-126(thick)と呼ばれるS-VHSビデオカセットテープが32本必要でした。テープ自体は一番廉価でしたが、bit error rateが高いのが問題でした。K4はSONY社のDIR-1000レコーダーを使用し、9-track ヘリカルスキャンヘッド方式で読み書きします。D1カセットテープを使用し、記録密度も高く取れて、MarkIIIテープ(Honeywell/Ampex社製)よりコンパクトかつcost effectiveで日本向き(昭和基地向き)でした。運用上の不具合も少ないという話でしたが、ノート記述のようにヘッド汚れが早いので、注意が必要でした。VLBIでは相関処理に2台のレコーダーを使用し、実時間再生してハードウェア的にFX演算しますが処理が終わるまで、テープを再利用できません。新しい実験のためにテープを購入し、実験ー処理を回転させますが、寝かせておくテープ代がばかになりません。同じシステムどうしでVLBI実験する限り発生しない伏在していた問題が南極VLBIのような異機種間の実験では顕在化しました。しかし、データ保存は今やHard Diskが主流です。いろいろなメーカーのHard Diskがあっても、メカトロニクスではなく、userにとっては完全にエレクトロニクスの世界です。相関処理にまつわるシステム上の複雑さは今(2013年現在)では殆ど解消しました。このようにVLBIは電子・通信インフラの進化で絶えず、改良され続けています。
Q2: Fig. 5の誤差楕円がやけに縦長ですが、何故ですか?
A2: (13)式でもわかりますが、X, Y方向の誤差が±6 mmなのに対してZ方向の誤差は ±14 mmあります。受信する電波星はすべて地平線より上側にあり、地球の裏側から来る電波は受信できないので、上下方向(Z方向に対応)の規制が弱く(精度が悪く)なります。GPSの場合も事情は同じです。
Q3: 精度に大差ないようなので、GPSがあれば、VLBIは無くても良いのではないですか?
A3: 良く言われる疑問です。本質的な違いはGPSが地球に準拠した仕組みなのに対してVLBIが電波星の位置に準拠している点にあります。地球は46億年の歴史のなかで、変動を重ねてきました(現在も宇宙に比べれば時間的に早い変化を重ねています)。VLBIが準拠する電波星に比べれば、位置(及び変動)基準の不変性が弱いことになります。測定精度が上がりsub-cmからsub-mmの変動を議論するようになると、位置基準の不変性が重要になってきます。測地学者の大勢は、GPSがVLBIにとって変わるとは考えていません。