南極地球物理学ノート No. 18 (2012.10.18)
DORISその3:DORIS による成果
澁谷和雄・土井浩一郎・青山雄一
Keyword: ドップラーカウント, 電離圏屈折補正, GRIM 重力ポテンシャルモデル, Kaula の法則,
海面偏差 (SLA), ign11wd01 時系列
第1章でDORISの測定原理と、得られるビーコン位置の精度について概観する。DORISはSPOT-2に始めて搭載されたが、2ヶ月の検証実験では重力モデルの改良が試みられ、得られたGRIM4-C2モデルがその後のTopex/Poseidonの精密軌道決定に用いられた。第2章でGRIMモデルの発展の概要をまとめる。レーダー高度計による海面高度の精密測定により、長時間平均海面(ジオイド)からの海面高偏差が得られるが、これをSea Surface Dynamic Height (SSDH)と呼び、海面温度を反映した凹凸で示される。この凹凸は黒潮など暖流系水域では凸になり、親潮・エルニーニョなど寒流系水域では凹になるので、経年的な全球海面変動を知る上で、重要な観測に発展した。第3章でSSDH変動の概要をまとめた。南極地球物理学ノートNo.17で述べた通り、数mm以下の誤差でビーコン位置が求められれば、その経年変動からプレート運動、Glacial Isostatic Adjustment (GIA)に関する情報が得られる。Syowa DORISのデータを用いて得られる情報を第4章にまとめた。
1.DORISの測定原理と精度
DORISの測定原理はDoppler countの観測方程式
N = (fG-fS)Δt - fG/C (ρ2 -ρ1) + ΔN (1)
をビーコン位置座標、衛星位置座標について解くもので、Valette et al. (1992)に説明が述べられている。ここで、
N :観測されるDopplerサイクル数
fG :ビーコンでの発振周波数
fS :衛星での受信周波数
Δt :Doppler shiftの計測時間でふつう10秒
ρ2 :ビーコン発振時におけるビーコンアンテナ位相中心の地心からの距離
ρ1 :衛星での受信時における衛星アンテナ位相中心の地心からの距離
ΔN:計測誤差、地球物理学的理由、相対論効果により生じる補正項
である。
測定原理自体にはTRANSIT測量と本質的な違いはない。しかし、TRANSITが400 MHzと150 MHzのペアを用いたのに対して、DORISは2GHzと400MHzのペアを用いていて、count分解能は2000MHz/400MHz = 5倍向上している。また、電離圏屈折補正のための周波数比も400/150 = 8/3から2000/400 = 5へと増大したので、電離圏屈折補正係数も1 -9/64 = 55/64 ~0.86から1-1/25 = 24/25 ~0.96へと補正効果が向上している。
Valette et al. (1992)は1990年1月22日打ち上げのSPOT-2搭載DORIS受信データ2ヶ月分を解析し、大気圏補正、特に湿潤大気補正の詳細、パス数、仰角cut-off、ビーコン位置(特に緯度)によるビーコン絶対位置の収束性(precision, またはinternal consistency)と精度(accuracy, GPSとの比較検証など)を論じているが、その詳細は省き、主要な点だけをまとめると以下のようになる。
(1) 1~2日の受信データにより最終収束解(ふつう20日の受信パスで得られる)に対して3成分とも1 m以内になる。
(2) 10~15日経つと収束解の変動は10 cmの安定性に達する。
(3) 1~2日観測すれば最小二乗解の公称誤差は10~20 cm以内になり、以後、漸近的に3-5 cm差に近づいて行く。
(4) 収束解の再現性はSPOT-2の場合、35パス受信で15 cmである。
(5) 収束解の安定性は南北成分が良く、東西成分と上下成分の分離安定性は弱くなる。
(6) 上下成分は大気圏伝搬補正の不確かさに影響されるが、近接した2地点(~20 km以内)の場合、両者の大気補正量が相殺できるので、相対測位世度は向上する。
上記収束の定性的な様相はTRANSITの場合と同じである.しかし,定量的にはTRANSIT測位に比べ分解能が5倍向上した分、測位の収束性能も約5倍向上している。
(1)式のN やΔtを正しく計測するためには搭載している時計が正確、かつ安定していなければならない。従って、DORISの性能を保証しているのは時計の元になるUSO (Ultra Stable Oscillator)にあると言える。USOが狂うと計測される衛星位置、ビーコン位置にも誤差が生じる。Willis et al. (2004)はJason-1に搭載されたDORISにより計測されるブラジル周辺のビーコン位置が数10cmずれて求まる理由について、磁場の弱いSouth Atlantic Anomaly (SAA)上空に衛星がさしかかると、宇宙線を強くあびて、その間、時計の歩みに狂いが生じるためとしている。このような宇宙線障害には前例があり、ERS-1衛星搭載のPRARE (Precise Range And Range-rate Equipment)はBrazilian Anomaly上空で機能障害を起こし、停止している。
2.重力モデル改良による衛星軌道位置の精密化
レーダー高度計による海面高の精密測定と地球重力モデルの精密化は表裏一体である。衛星軌道上でのレーダー発信位置が正確でないと、測定した海面高の位置同定が正確でなくなる。衛星は大気ドラッグや太陽風輻射圧などの外力を受けるものの、基本的には地球重力ポテンシャルに従って運動する。従って、地球重力ポテンシャルを出来るだけ精確に決定しようと、世界中の多くの研究者・(主に宇宙測地に関係した)研究機関が並行して取り組んできた。基本的には、地球重力ポテンシャルを(2)式
![]() (2)
(2)
により球面調和展開した時のStokes係数Cnm, Snm をできるだけ高次まで求める努力である(南極地球物理学ノートNo. 12も参照)。その解法には独特の流れ、特徴があり、詳細はRapp (1998)によるレヴューが詳しい。
SPOT-2やTopex/Poseidonは特にフランスのCenter National d’Études Spatiales (CNES)が開発に関わったことから、これら衛星の運動を記述する地球重力モデルの精密化は、関連機関のGroupe de Recherche de Géodesie Spatiale (GRGS) 及びGRGSと密接な協力関係にあるドイツ・グループとの共同作業で進展した。もっと具体的にはGRGSのGeorge Balminoと、ミュンヘン工科大学にいたChristoph Reigberの協力をベースにしたGRIM と呼ばれる地球重力モデルの構築作業であり、Reigberがミュンヘン工科大学からDeutches Geodätisches Forschungs Institut (DGFI)へ、DGFI からGeoforschungs Zentrum (GFZ) Potsdamへ移動しても両者の協力関係は継続し、20年にわたってモデルのversion upがなされていった。
文献上のGRIMの始まりはBalmino et al. (1976)によるGRIM1であり、Balmino et al. (1978)の GRIM2を経て、その後、Reigber et al. (1983)によるGRIM3へと進み、Topex/Poseidonデータを含めたGRIM4で飛躍があり、GRIM4-S1/C1(Schwintzer et al., 1991)からGRIM4-S4/C4 (Schwintzer et al., 1997)への4段階の進歩があり、2000年にはGRIM5-S1 (Biancale et al., 2000)とGRIM5-C1 (Gruber et al., 2000)へとさらに進化した。
ここで、S1とかS4とかのSはsatellite-only solutionを意味していて、光学測量、Laser RangingやDORISなどの衛星追跡(tracking)データだけを用いて、Stokes係数Cnm, Snm を決めるやり方である。Fig. 1はBiancale et al. (2000)に記載されているGRIM5-S1決定に寄与した衛星の軌道傾斜角と高度の分布であるが、使用できる衛星の数が多くなり航行高度の幅が拡がるほど、緯度方向(zonalな起伏)の分解能を示すdegree項(n に対応)は一般的に高次まで決定できる。但し、リモートセンシング衛星はふつう、軌道傾斜角が大きい(70°-110°)ので、そういう衛星だけでは、経度方向(tesseral な起伏でorder項m に対応)の分解能は上がらない。model versionの進化は、DORISを搭載した衛星が増え、精度のよいtrackingデータが増えたという積算効果(Table 1参照)と、低傾斜角の衛星データを含めることで、衛星配置の偏りを抑えcoverageを拡げたことの2つの効果により、Table 2に示されるように決定できる次数が上がって行ったことに対応している。
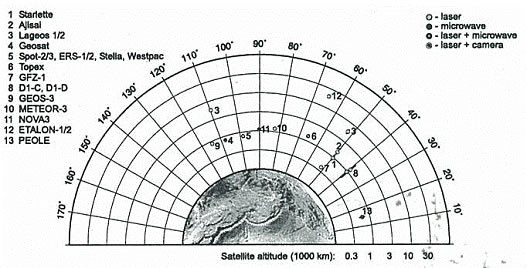 |
| 図1. GRIM5-S1の決定に用いられた衛星は21あるが、代表的な13衛星の航行高度、軌道傾斜角を示す。Biancale et al. (2000)から転載。 |
satellite-only solutionではしかし、次数を上げる(短波長のジオイド起伏まで表現する)ことには限界があり、Kaula's rule of thumb (Kaura, 1966:辞書に依るとrule-of-thumbは親指で測る大雑把な方法とあるが、ここでは「経験則」と訳す)により、Cnm, Snmの標準偏差(variance)s が(3)式
![]() (3)
(3)
により次数n の2乗で減衰して行くという拘束条件を組み込んでいる。従って、Table 2に見るS解の次数も、Kaulaの経験則を織り込んで計算上求められる次数であり、データだけから完全に説明できる次数はGRIM5-S1でもn = 32までである。
一方C1とかC4とかのCはcombined solutionを意味していて、satellite tracking dataだけでなく陸域(携帯式スプリング重力計などで測った)及び海域(海上重力計ではかった)での1° x 1°メッシュ、あるいは30' x 30'メッシュの重力異常データ、海域のレーダー高度計測定データ(実際上Sea Surface Heightが得られる)からLevitus (1982)などによるSea Surface Topography (SST:実際上SSDHに等しい)を差し引いて得られるジオイド高を重力異常に換算したメッシュデータで埋めて、正規方程式を作り、satellite-only solutionの場合より正規方程式の数を増やして解いて得られる解である(どうやって正規方程式をcombineし、どうやって解くかは、専門性が強いのでここでは省略する)。この場合、Table 2, Fig. 2(Cnm, Snm をジオイド高に換算した時の次数に対する減少傾向として表している)に示されるように、S解よりも高次までデータだけによる収束解が得られる。
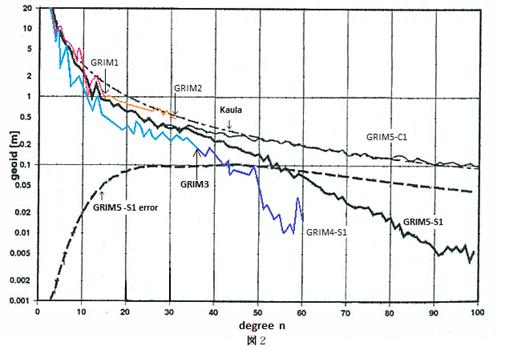 |
GRIMモデルの決定次数の変遷。GRIM1 (Balmino et al., 1976)は赤で15次まで、GRIM2 (Balmino et al., 1978)は橙色で23次まで、GRIM3 (Reigber et al., 1983)は薄い空色で36次まで、 GRIM4-S1 (Schwintzer et al., 1991)は濃い空色で60次まで得られた。これらの結果をGRIM5-S1 (Biancale et al., 2000)とGRIM5-C1(Gruber et al., 2000)に重ね合わせた。なお、縦軸は(3)式のsで表現したもの、Geoid Heightに換算したもの、gravity-anomaly varianceで表現したものが混在するが、図2ではGeoid Heightに換算し、統一した。
地球重力モデルが精密になればなるほど、軌道上の衛星位置は精度よく決定できる。1980年代当初のGRIM3によるBeacon C及びLageos衛星のradial errorはそれぞれ~0.7 m, ~0.4 mであった(軌道arcのoverlapの取り方により精度が変わるので概略値である)。それがDORISを利用した1990年代後期のGRIM4-S4によるTopex/Poseidon及びERS-1衛星の場合、radial errorは2 cm及び5 cmへ、GRIM5-S1を用いた場合、その決定精度はさらに1 cm以下、及び3 cmへと向上している。
3. SSH精密決定への寄与
海面高度は時間・空間的に絶えず変動している。レーダー高度計は軌道直下、ほぼ数百m半径の瞬間的な海面高度を測っているが、場所を固定した時間平均を10日、1ヶ月,1年,10年と延ばし、ジオイド(事実上時間変化しない。例えば7年以上の長時間平均で得られる地球重力モデル)からの偏差をそれぞれ求めると、海洋物理学的な意味を持つ時間平均化された海面高度(Sea Surface Height: SSH)が得られるが、その変動振幅は10日平均でゆうに~±20 cmを越える。また、時間変動しないと仮定した平均海水面にも実際には、季節的及び経年的な変動が見られ、これをSea Level Anomaly (SLA)と呼ぶ。Fig. 3はArchiving, Validation and Interpretation of Satellites Oceanographic data (AVISO) Newsletter No. 9(May 2003) に掲載されたJason-1衛星(回帰周期10日)の Interim Geophysical Data Record (IGDR) のサイクル21の10日間平均データから得られたSLA (7年平均からの偏差)である。このカラー図は黒潮やACCによる海面の凹凸をそのまま表したものではないが、該当する海域に対応して海面高度に大きな変動(variability)が生じていることが一目で見て取れる。
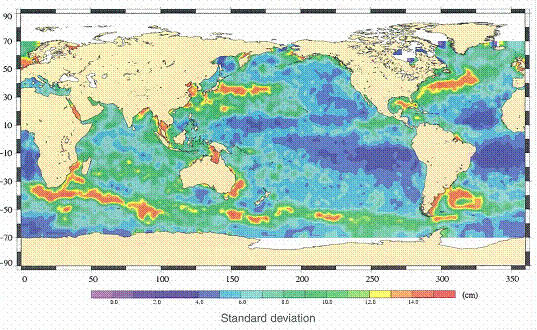 |
| 図3. Jason-1衛星(回帰周期10日)のサイクル21データから得られたSLA図。AVISO Newsletter No. 9 (May 2003)から転載。 |
Topex/Poseidonの10年間の運用で得られたSLAデータは200 million pointを越え、30000枚のGeophysical Data Records (GDR) CD-ROMとして研究者に配布されたとのことである。Topex/Poseidonの軌道交差点での高さの標準偏差が6.5 cmなのに対して、Jason-1のそれも7 cmと同程度であり、観測時のreal-time Operational Sensor Data Records (OSDR)と、2.5 cm rmsの軌道誤差で特徴づけられるreal-time位置データをmergeすると、~5 cm精度のSSHを求めることができたと言う。AVISOはSSHより扱いやすい0.25˚ x 0.25˚分解能の10日間隔のMSLA (Maps of Sea Level Anomalies)を公表し、そのなかには1997-1998 El Niño eventも含まれている。
レーダー高度計データの特徴は観測データの積算効果が顕著に現れることである.DORIS搭載衛星の高度計のみならず、GEOSAT, ERS-1, ERS-2, ENVISATなどの高度計のデータを合わせ解析すれば、地球重力モデルの決定次数を上げるだけでなく,、汐パラメーターも同時に解いて、SSHを高い分解能で分離することができる。DORISは地球重力モデル、衛星追跡局位置、海洋変動を同時に精度よく推定するための軌道tracking dataの数を飛躍的に増大させた点で画期的であった。
4. DORISにより求められた昭和基地基準点の位置座標の変遷
4.1. 地心座標系での位置
(1)式を解いてビーコン位置を求めるためには十分な数のpassに基づくDoppler dataを集める必要がある。1993年当初、昭和基地ビーコンSYOBの解はTable 3(1)が示すように、Pascal Willisが2ヶ月データを用いて試算した値が初めてであるが、精度は3成分一律1σ = 4 cmであくまでも参考値であった。1年データによるSYOB解が初めて得られたのはTable3(2)で、1994年出版のWorkshop report: A first Topex/Poseidon terrestrial reference frame including SLR/DORIS/GPS tracking and tide gaugesに記載されているとしてAlain Orsoniが知らせてきた値である。しかし、IERS Technical Note No. 18 (1994)が収録するITRF93解にはSYOBのみならず、DORIS網の結果自体がまだ含まれていない。DORIS解析結果がIERS Technical Noteに初めて反映するのは1996年のNo. 20 (Table 3(3); Boucher et al., 1996) からであり、X,Y,Z各成分の精度が2-3 cmになっている。しかし、速度場はまだ与えられていない。1996年頃からはmonthly solutionが得られるようになり、Table3(4) (Boucher et al., 1998) にみられるように、位置及びその誤差、速度とその誤差が記載されるようになった。1999年からはSYOBに代わりSYPBの結果が計算され、http://ids.cls.fr/html/doris/stations/stations.php3に掲載されるようになった(Table 3(5))。SYPBはSYOBに対してoffsetを持つ(南極地球物理学ノートNo. 17)ので、そのまま座標値を比較することは意味がないが、解の安定性が3 – 7 mmでSYOBの安定性16 – 18 mmに比べ、factorで3 – 5倍良くなっていることがわかる。2003年頃からはweekly solutionも得られるようになり2003年7月1日のInternational DORIS Service (IDS) の設立に伴い、そのsolutionはhttp://www.ids-doris.org/index.phpから公表されている。
4.2. 測地座標系での位置変化、特に上下方向速度
IDSの設立当初、station coordinates (sinex解)としていくつものversionが公表された。例えばWillis et al. (2005)によるglobal solutionにはign03d01、monthly solutionにはign03md01、weekly solutionにはign03wd01などといったコードが付与されている。Fig. 4はftp://doris.ensg.ign.fr/pub/doris/products/stcd/ign03wd/ign03wd01.stcd.sypb.gif として掲載されたSYPBのweekly solutionによるNS(上), EW(中), UD(下)の各方向の位置変化を表し、各slopeから北向き5.0±0.3 mm/yr, 西向き-4.8±0.3 mm/yr,上向き 4.5±0.3 mm/yrといった速度が求められている。一方、GRACE衛星の登場によって地球重力場モデルがさらに改良されるとすぐ再解析が行われ、ign04d02 というITRFに準拠した解(Willis and Heflin, 2004), ign05d02というfree-network解 (Willis and Ries, 2005)などのコードが付与されている。このような変遷に応じて得られるDORISによる昭和基地の上下速度はAmalvict et al. (2007)によりTable 4にまとめられたが、解析モデル依存性がきわめて強かった。また、速度場の決定は当然、時系列の長さにも依存するが、少なくとも何年分あれば安定解が得られるかについてはいまだ不明確と言って良い。
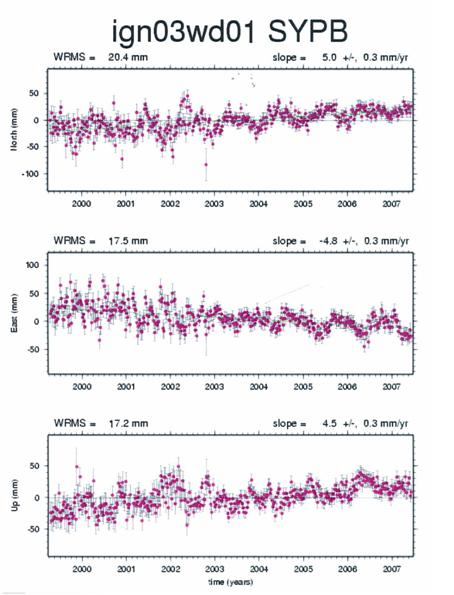 |
| 図4. ign03wd01によるSYPBの移動速度(1999-2007年データに基づく)。ftp://doris.ensg.ign.fr/pub/doris/products/stcd/ign03wd/ign03wd01.stcd.sypb.gifから2007/07/18にダウンロード。 |
5. まとめ
DORISの最新時系列解はFig. 5に示される。weekly solutionが与えられ始めた1995年
に始まり、pylon towerの倒壊(1998年5月)に伴う1年間の空白期間の後、1999年の再建を経て2011年までの16年データが表示されている。SYOBは徐々に傾いていったので(南極地球物理学ノートNo. 17)、そのデータを含めて上下速度を見積もるのは妥当でない。その意味で、Table 4のvertical velocityのうち意味を持つのはSTCD-IGN解だけであろう。
Fig. 5の最新データによると、SYPB vertical velocityは2つのtrendを持ち、1999-2002年は+4.8 mm/yr、2001-2010年は-0.54 mm/yrということになる。2001年前後の変化が真の傾向変化を表しているのか座標系選択に関係するみかけの傾向なのかは見極める必要がある。
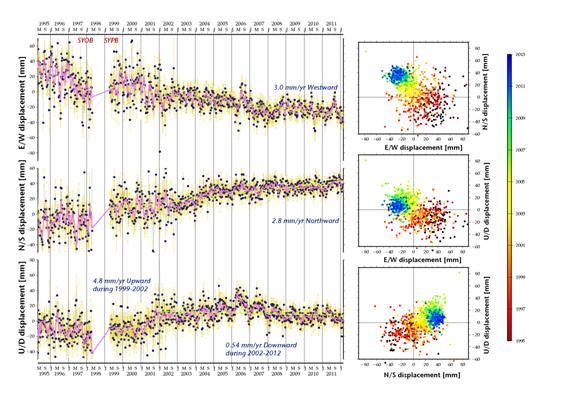 |
| 図5. 最新データ(2011年まで)を含めたSYPBの移動速度。SYOBは徐々に傾き、1997年に倒壊したパイロン上の点なので、上下速度推定に用いるのは不適切である。SYPBは建設当初(1999年)から安定しているが、1999-2002のトレンド+4.8 mm/yrと2002-2012のトレンド-0.54 mm/yrの違いが有意なのかどうかは見極める必要がある。IDSホームページ(http://ids-doris.org/network/ids-station-series.html)からダウンロードしたign11wd01データをもとに青山雄一が作成した。 |
参考文献
Amalvict, M., Willis, P., Shibuya, K., 2007. Status of DORIS stations in Antarctica for
precise geodesy. in Dynamic Planet, IAG Symposia 130, eds. P. Tregoning and C.
Rizos, 94-102, Springer-Verlag, Berlin.
Balmino, G., Reigber, Ch., Moynot, B., 1976. A geopotential model determined from
recent satellite observing campaigns (GRIM1). Manuscripta Geodaetica, 1, 41-69.
Balmino, G., Reigber, Ch., Moynot, B., 1978. Le modèle de potentiel gravitationnel
terrestre GRIM2: Détermination, évaluation. Ann. Geophys., 34, 55-78.
Biancale, R., Balmino, G., Lemoine, J.M., Marty, J.C., Moynot, B., Barlier, F., Exertier,
P., Laurain, O., Gegout, P., Schwintzer, P., Reigber, Ch., Bode, A., Konig, R.,
Massmann, F-H, Raimondo, J.C., Schmidt, R., Zhu, S.Y., 2000. A new global Earth's
gravity field model from satellite orbit perturbations: GRIM5-S1. Geophys. Res.
Lett., 27(22), 3611-3614.
Boucher, C., Altimimi, Z., Feissel, M., Sillard, P., 1996. Results and Analysis of the
ITRF94. IERS Technical Notes, 20, Table T7.
Boucher, C., Altimimi, Z., Sillard, P., 1998. Results and Analysis of the ITRF96. IERS
Technical Notes, 24, Table T7.
Gruber, T., Bode, A., Reigber, Ch., Schwintzer, P., Balmino, G., Biancale, R., Lemoine,
J.M., 2000. GRIM5-C1: Combination solution of the global gravity field to degree
and order 120. Geophys. Res. Lett., 27(24), 4005-4008.
Kaula, W., 1966. Theory of Satellite Geodesy. Blaisdale Press, Waltham, Mass..
Levitus, S., 1982. Climatological Atlas of the World Ocean. NOAA Prof. Paper No. 13,
173, U.S. Government Printing Office, Washington, DC.
Rapp, R.H., 1998. Past and future developments in geopotential modeling. in Geodesy
on the Move, IAG Symposia 119, eds R. Forsberg, M. Feissel, R. Dietrich, 58-78,
Springer-Verlag, Berlin.
Reigber, Ch., Balmino, G., Moynot, B., Mueller, H., 1983. The GRIM3 Earth gravity field
model. Manuscripta Geodaetica, 8, 93-138.
Schwintzer, P., Reigber, Ch., Massmann, F-H, Barth, W., Raimondo, J.C., Gerstl, M., Li,
H., Biancale, R., Balmino, G., Moynot, B., Lemoine, J.M., Marty, J.C., Boudon, Y.,
Barlier, F., 1991. A new Earth gravity field model in support of ERS-1 and SPOT-2:
GRIM4-S1/C1. Final report to the German and French Space Agencies (DARA and
CNES). München/Toulouse.
Schwintzer, P., Reigber, Ch., Bode, A., Kang, Z., Zhu, S.Y., Massmann, F-H, Raimondo,
J.C., Biancale, R., Balmino, G., Lemoine, J.M., Moynot, B., Marty, J.C., Barlier, F.,
Boudon, Y., 1997. Long-wavelength global gravity field models: GRIM4-S4,
GRIM4-C4. Journal of Geodesy, 71, 189-208.
Valette, J.J., Cazenave, A., Boucher, C., Gavoret, M., 1992. Absolute and relative
positioning with the DORIS system: first results with DORIS on SPOT-2.
Manuscripta Geodaetica, 17, 36-51.
Willis, P., Heflin, M., 2004. External validation of the GRACE gravity
CGM01C gravity field using GPS and DORIS positioning results. Geophys. Res. Lett., 31(13),
L13616.
Willis, P., Haines, B., Berthias, J.-P., et al., 2004. Behavior of the DORIS/Jason
oscillator over the South Atlantic Anomaly, Comptes Rendus Geoscience, 336(9),
839-846.
Willis, P., Ries, J.C., 2005. Defining a DORIS core network for Jason-1 precise orbit
determination based on ITRF2000, Methods and realization. J. Geod., 79(6-7),
370-378.
Willis, P., Boucher, C., Fagard, H., Altamimi, Z., 2005. Geodetic applications of the
DORIS system at the French Institut Géographique National. Comptes Rendus
Geoscience, 337(7), 653-662.
Table 1. Progress of DORIS and launched satellites |
|||
| Date of Launch | Satellite | DORIS Generation* | Orbit Height (km) |
22 January 1990 |
SPOT-2 |
1G |
830 |
10 August 1992 |
Topex/Poseidon |
1G |
1330 |
26 September 1993 |
SPOT-3 |
1G |
830 |
24 March 1998 |
SPOT-4 |
1G |
830 |
7 December 2001 |
JASON-1 |
2GM |
1330 |
1 April 2002 |
ENVISAT-1 |
2G |
800 |
4 May 2002 |
SPOT-5 |
2GM |
830 |
20 June 2008 |
JASON-2 |
2GM |
1336 |
8 April 2010 |
CRYOSAT-2 |
2G |
717 |
* 1G = first generation receiver, 2G = second generation receiver, 2GM = miniature type of second generation receiver |
|||
Table 2. Degree and Order of solution of GRIM Earth gravity model |
|||||
| Model name(1) |
Zonal number(2) |
Tesseral number |
Tracking stations |
Number of satellites |
Reference |
GRIM1 |
n = 3-15 |
m =0 to 10 |
36 |
21 |
Balmino et al., 1976 |
GRIM2 |
n = 2-23 |
m =0 to n |
38 |
23 |
Balmino et al., 1978 |
GRIM3 |
n = 2-36 |
m =0 to n |
95 |
22 |
Reigber et al., 1983 |
GRIM4-S1 |
n = 2-50 |
m =0 to n |
96 |
27 |
Schwintzer et al., 1991 |
GRIM4-C1 |
n = 2-50 |
m =0 to n |
96 |
27 |
Schwintzer et al., 1991 |
GRIM4-S4 |
n = 2-60 |
m =0 to n |
> 300 |
34 |
Schwintzer et al., 1997 |
GRIM4-C4 |
n = 2-72 |
m =0 to n |
> 300 |
34 |
Schwintzer et al., 1997 |
GRIM5-S1 |
n = 2-99 |
m = 0 to 95 |
250 |
21 |
Biancale et al., 2000 |
GRIM5-C |
n = 0-120 |
m =0 to n |
250 |
21 |
Gruber et al., 2000 |
(1) For GRIM1 through GRIM3, there was no identification of S or C, but GRM1 corresponds to S solution, while GRIM2 and GRIM3 do C solutions. |
|||||
Table 3. History of Syowa DORIS position |
||||
| X (m) σX (m) VX (mm/yr) |
Y (m) σY (m) VY (mm/yr) |
Z (m) σZ (m) VZ (mm/yr) |
Reference System | |
(1) |
1766498.867 |
1460274.482 |
-5932211.673 |
ITRF92 at epoch 1993.0 (SYOB) |
(2) |
1766498.848 |
1460274.461 |
-5932211.688 |
ITRF93 at epoch 1993.0 (SYOB) |
(3) |
1766498.873 |
1460274.430 |
-5932211.730 |
ITRF94 at epoch 1993.0 (SYOB), |
(4) |
1766498.945 |
1460274.416 |
-5932211.697 |
ITRF96 at epoch 1997.0 (SYOB), |
(5) |
1766505.896 |
1460266.974 |
-5932207.693 |
ITRF2000 at epoch 1997.0 (SYPB), |
Table 4. DORIS vertical velocity estimated for Syowa |
||||
| Source | Station code | V (mm/yr) | σV (mm/yr) | Data span |
ITRF96 |
SYOB |
2.14 |
8.58 |
|
ITRF97 |
SYOB |
5.89 |
5.06 |
|
ITRF2000 |
SYOB/SYPB |
2.11 |
1.89 |
|
IGN03D02 |
SYOB/SYPB |
1.81 |
0.25 |
1999.0 - 2007.5 |
IGN04D02 |
SYOB/SYPB |
3.61 |
0.21 |
1993.0 - 2004.0 |
IGN05D02P |
SYOB/SYPB |
3.89 |
0.19 |
|
STCD_IGN |
SYOB |
4.04 |
0.49 |
1993.0 - 1998.0 |
|
SYPB |
3.50 |
0.28 |
1999.0 - ? |
Q and A
Q1: GRIM5は2000年代初めの成果のようですが、今は2012年ですよね。この10年間はもうやることがなかった、ということでしょうか?
A1: そんなことはありません。2000年代にもCHAMP, GRACEという重力ミッションの衛星が打ち上げられました。CHAMPからはEIGEN-1, EIGEN-2というさらに高次までの地球重力場モデルが、さらにはGRACEデータを含めCGM03Sなどというもっと高次の180次のモデルが構築されました。ここでは、CHAMP, GRACEの説明は省きますが(概要については南極地球物理学ノートNo. 5参照)、ひとつ象徴的なのは、アメリカ(NASA GSFC/JPL, UTEX/CSRなど)も当然1970年代から独自の重力場モデルを発展させていたわけですが、GRACEではアメリカ(具体的にはUTEX/CSR)とヨーロッパ(具体的にはGFZ Potsdam)が共同体制を組んだことです。図2から推測できる通り次数が180ともなるとジオイド高に換算して1 cm以下の質量分布を議論するわけで、もはや時間的に不変ではなくtime-variable geoidの領域に入ります。変動は主に水・大気質量の循環に原因があるわけで、1ヶ月ごとの重力ポテンシャル場の時系列から南極氷床質量の減少や雨季でのアマゾン降水の規模や時間変化を検出するところまで可能になっています。
Q2: ヨーロッパ、アメリカの話は出てきますが、日本の貢献はないのでしょうか?
A2: 地球重力モデルについては殆ど出番はありませんでした。しかし、月探査ではJAXAと国立天文台の研究者たちがRISEというプロジェクトチームを組んで、SELENE (Kaguya)という人工衛星の軌道追跡データからSGM100hという100次まで展開した球面調和関数の係数を求めています(アメリカの探査チームを凌駕する結果を最近(2009-2010頃)得ています)。月の形状や重力異常データを併せ解釈すると、次数で50 - 70までは信頼に足る結果と言われています。googleでSELENE, RISEプロジェクト、並木則行、松本晃治などのキーワードで検索すると概要を知ることができます。
Q3: 人工衛星は太陽系の他の衛星の周りも周回しましたよね。他の衛星についてはどうなのですか?
A3: 2012年11月2日の日本測地学会第118回講演会で、日置幸介・橋本実奈(北大・理学部)が「惑星重力場におけるカウラ定数のスケーリング則」という発表を行っています。それによると、他の地球型惑星でもカウラ則は成り立っていて、(3)式の係数は惑星の地上重力の二乗に反比例する(水星以外は)とのことです。詳しくは述べませんが、カウラ則の成り立ちは星間物質集積後の融解と中心核の形成及びマントル・地殻の成層構造形成といった、惑星進化の歴史と関係がありそうです。