南極地球物理学ノート No. 9 (2012.01.30)
TRANSIT測位1 – 昭和基地基準点測量への利用
澁谷和雄
Keyword: 昭和基地天測点, NNSS 衛星, トランジット測位, WGS72楕円形, 鉛直線偏差, ナルダンクロノグラフ
人工衛星による位置決定はGPSの登場で、身近なものになった。安価な小型受信機を使って世界中どこにいようとも、一定の精度で自分の位置を知ることが可能になった。しかし、1980~1990年代なかばにかけては、一世代前のTransit 衛星による測位が外洋や南極などの遠隔地で用いられていた。Transit衛星を用いた測位は、地球重心に対する3次元直交座標系での位置が決まる点で、それまでの天文・測地測量を原理の点でも精度の点でも凌駕する画期的なものであった。このノートでは、TRANSIT測位の南極観測隊での利用例の第一弾として、基準点測量への応用を示す。
1.TRANSITシステムの歴史と原理
Transit 衛星はドップラーシフト(Doppler shift)の原理を利用した位置決定のための専用衛星で、NAVSATともNNSS (Navy Navigation Satellite System)とも呼ばれている。以下ではNNSSで統一する。
開発の契機が1957年10月4日の旧ソ連によるSputnik-1の打ち上げであることは、有名な話である。Sputnik-1の発信電波がDoppler shiftすることにJohns Hopkins 大学のApplied Physics Laboratory (APL)の2人の研究者が気付き、それを利用して衛星の軌道決定ができるのではないかと考えたのが契機と言われている (Guier, W.H., Weiffenbach, G.C., 1958)。当時のAPL研究所長のFrank McClureはその方法を推し進め、予めわかっている、あるいは予測できる衛星位置から逆に、Doppler shiftを用いて地上受信機の位置を求める方法(NNSS受信機)を考案した。この仕組みの特許申請は1965年に認められている(McClure, F.T., 1965)。
冷戦の時代を反映し、この航法システムはポラリス原子力潜水艦が数十分浮上している間に衛星電波を受信し、自分の位置を数百mから1 km以内の精度で求めるのにうってつけであった。そのため当初、アメリカ海軍専用の軍事システムとして用いられていたが、1967年4月29日にその内容が民間にも公開され、商用受信機が作られるようになった。しかし、高価なこともあり、日本南極地域観測隊(JARE)が使用したのは、第20次隊のやまと・ベルジカ旅行(1979年9月)が初めてである。
wikipedia 及びPryor (1989)などを基に、TRANSITシステムの歴史的経過を表1にまとめた。
2.TRANSITの測位原理
図1のような受信機-衛星の配置を考える。NNSS衛星は399.968 MHzと149.988 MHzの可干渉性電波を発振している。この搬送波にはBEEPERと呼ばれる2分毎の時刻コードがのっている。図1では発振時刻tk-1, tk(正分値とする)における衛星位置が示されている。一方、NNSS衛星受信機は内蔵の水晶発振器を用いて400 MHz及び150 MHzの電波を生成できる。なおかつ、上記二波の電波を捕捉・受信できる。受信機に対する衛星のtransverse方向(直距離の方向である視線方向に対して直交する方向)の速度成分がゼロの場合(軌道上で受信機の直上に衛星が来た場合)、受信機内に生じるビート信号は400 MHz ‒ 399.968 MHz = 32 kHzになる。実際には衛星及びNNSS受信機内の発振器の周波数は時間的に変化(drift)するし、衛星は時々刻々上空を移動して行くので、その相対運動に伴う周波数変化が重畳したビート信号が生じることになる。受信機は衛星が地平線からのぼり、地平線にまた沈むまでの約20分間におけるビート信号の周波数変化を離散化したDoppler countとして記録できる。
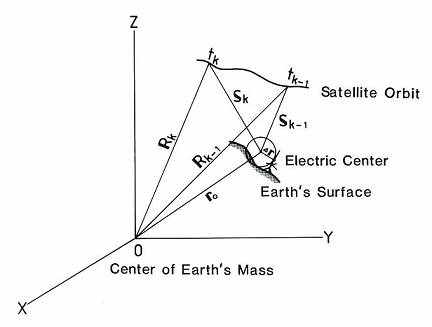 |
| 図1. NNSS衛星の正分値tk における位置(地球中心からの距離ベクトルをRk とする)と地上受信点の配置。地上受信点の地球中心からの距離ベクトルをr0、受信点と衛星位置間の距離ベクトルをSk とする |
2.1. 電離層屈折補正
搬送波は電離層で屈折するので受信機-衛星間の直距離(図1でのSk-1, Sk)より長い経路を通る。第一近似として屈折遅延は周波数f の二乗に逆比例し、その絶対値は不明でも、同一経路での遅延の相対量は二周波受信で知ることができる。Doppler shift Δf はf に逆比例し、
![]() (1)
(1)
で近似できる(Guier, 1961)。
今、高い側の送信周波数をf H , 低い送信周波数をf L , それぞれのDoppler周波数をΔf H , Δf L , また、受信周波数をf HR , f LR とすると、
f HR = f H + Δf H + εf H (2)
f LR = f L + Δf L + εf L (2)'
で記述できる。ここで、εf H 及びεf L は電離層による屈折効果が受信Doppler周波数に及ぼす影響であるが、これらは、(1)式より送信周波数の逆数に比例するから、K= f H/f Lとおくと、εf L = Kεf Hとなる。また、Doppler周波数自体は送信周波数に比例するからΔf H = KΔf Lとなる。以上、整理すると、受信周波数を組み合わせて、
f HR ‒ K f LR = (1 ‒ K2) εf H (3)
が得られる。今、K = 400 MHz/150 MHz =8/3であるから、εf Hは
| εf H = | (3)' |
となり、観測量(受信周波数)の組み合わせで電離層遅延によるDoppler周波数の影響が求められたことになる。(3)'式によるεf H を400 MHz帯で得られたDoppler count値から差し引くと、lock-onから時刻tk までの、屈折の影響を殆ど取り除いた(真空中の電波伝搬に相当する)400 MHzの積算 Doppler count値Nkを求めることができる。
2.2. 受信位置決定の定式化
積算Doppler count値Nkを用いた受信位置決定の定式化はMoffett (1971), 木村小一(1977)に詳述されている。ここではShibuya (1985)に従い、概要のみ記述する。
衛星時刻系あるいは受信機時刻系での積算Doppler count 値L は、衛星-受信機間の直距離の時間変化と関係づけることができて、その数学モデルFはモデルパラメーターXを用いて記述できるとする。この時、解くべき数学モデルFは逐次近似法
V = AX + L, (4)
V = Lobs ‒ Lmodel, (5)
Lmodel = F(Xmodel), (6)
L = F(X0) ‒ Lobs, (7)
で表現される。但し、数学モデルFはXの初期値X0でテイラー展開、線形近似可能(二次以下高次の項は無視できる)とみなす。X0には受信機の初期座標r0 = (X0, Y0, Z0)だけでなく、受信機の初期周波数オフセットFL = 32 kHz(400 MHzに対して80 ppm)も含まれている。Aは、数学モデルFのモデルパラメーターXについての偏微分係数で構成される行列である。
初期値X0に対する補正量Xが最小二乗法的に求められれば、
Xmodel = X0 + X (8)
として、(4)-(7)式に従い、Lmodelを更新し、(7)式左辺がしきい値以下のある値Lminになった時点で近似ステップを打ち切る。(8)式におけるXの最適推定解Xoptは結局、
Xopt = ΣxAtPLmin (9)
で表現される。但し、Σx はXの分散-共分散行列
Σx = (AtPA + Px)‒1 (10)
である。この時、重み付き残差の二乗和RSSは
RSS = VtPLmin (11)
で評価できる。ここで、添え字‒1は逆行列、tは転置行列を表し、Pは観測量の重み行列、Pxは未知量の重み行列である。
(4)式においてVはm個の要素vk, k-1 (k = 1, ..., m)で構成される一次元ベクトルで
vk, k-1 = gk ‒ gk-1 (12)
但し
![]() (13)
(13)
である。また、
λ0 ~ c0 / 400 MHz ~ 75 cm (14)
で c0 = 2.997925 x 108 m/s が当時の定義による真空中の光速度として用いられている (Seppelin, 1971; なお、2012年現在の定義ではc0 = 2.99792458 x 1010 cm/s)。
(13)式におけるΔFLがFL = 32 kHzに対する補正量、Δr = (ΔX, ΔY, ΔZ)が受信機の初期位置ベクトルr0 = (X0, Y0, Z0)に対する補正量である。Nk ‒ Nk-1はtk ‒ tk-1の間に数えられた電離層屈折補正後のDoppler count値で、Tkは地上気象要素(気温、気圧、相対湿度)を用いて推定される大気圏屈折遅延による影響量である。
|Sk|2 = (Xk ‒ X0)2 + (Yk ‒ Y0)2 + (Zk ‒ Z0)2 (15)
(Sk·Δr) = (Xk ‒ X0) ΔX + (Yk ‒ Y0) ΔY + (Zk ‒ Z0) ΔZ (16)
であるが、Skを求めるためにはtkにおける衛星位置ベクトルRk = (Xk, Yk, Zk)を知る必要がある(図1参照)。
2.3. NNSS衛星が送信する位置情報
人工衛星は第一近似的には、長半径A、離心率ε、近地点通過時刻tp、昇交点経度Ω、近地点引数ω、赤道に対する傾斜角i の6つの要素で決まる楕円軌道を飛ぶ。NNSS衛星の場合、Ωやωの変化率、オフセット周波数のドリフト率(ppm単位)など12のfixed dataが用意されていて放送軌道要素(broadcast ephemeris:放送暦とも言う)として送られてくる。放送軌道要素のなかにはさらに、variable data (短命語)と称して、離心近点離角ΔEk、長半径変化ΔAk、軌道面からのcross-trackずれηkなど、絶えず更新される情報もある。これらを含め、2分間フレームに入っているデータは157 wordあるが、民間に公開されているデータは上記軌道要素やBEEPER含め23 wordであった(表2参照)。なお、各wordを構成するビット"0" またはビット"1"はdoubletと呼ばれる位相変調がかけられた矩形波形で、その時間長は2t (t = 9.831 ... ms)である。各wordはBCD-X3 (Binary Coded Decimal Excess Three)フォーマットで作られ、157番目の19 bitデータ以外は39 bitで構成されている。従って全体で6103 bit、時間長は2 x 9.831... ms x 6103 = 120 sで、2分フレームにぴったり収まるように設計されている。
衛星の位置誤差は、受信点の位置誤差に直接的に反映するため、軌道要素を一定として長時間運用すると、実際からの位置ずれ誤差が累積していく。その主要因は、予測し難い大気抵抗で、例えば、ID = 30200衛星は1980年4月25日から、1984年6月24日までの約4年間で、長半径が7395.9 kmから7391.8 kmへと4.1 km減少した。一方、ID = 30190衛星は同じ期間に約2.8 kmの減少である。このように大気抵抗が衛星によりまちまちなので、NAG (Navy Astronautics Group)というアメリカ海軍機関がNNSS衛星の軌道データを追跡・管理し、定期的に軌道要素を更新し、衛星から放送していたわけである。放送データをもとに時々刻々の衛星位置(Xk,Yk, Zk)を推定するには、複雑な計算式と、離心近点離角ΔEk、などの内挿曲線近似が必要であるが、冗長なので、ここでは省略する。
3.昭和基地天測点での受信
第21次隊は、第1次隊が設置した昭和基地・天測点において、1980年4月下旬から5月上旬にかけての2週間、受信実験を行った。解析には、4月25日から5月2日までの7日間データを用いた。図2(a)に設置したアンテナを、2(b)に受信機(JMR-1)と現場解析用プロセッサー・プリンター(JMR-1MP)を示す。当時、二周波のNNSS受信機メーカーは主だったところで4~5社あったが、JAREは第20次隊以来、JMR社のものを使用していた。
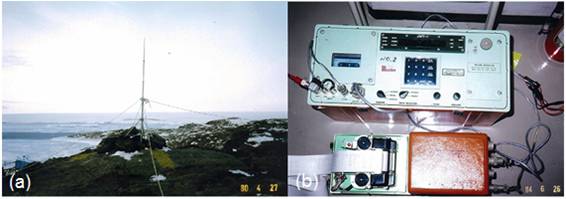 |
| 図2. (a) 昭和基地天測点に設置されたJMRアンテナ、 (b) 受信器JMR-1(上)とマイクロプロセサーJMR-IMP(下) |
マイクロプロセッサーによる現場解析の結果は以下の通り(Shibuya et al., 1982)。
(1) ID = 30110, 30130, 30140, 30190, 30200という衛星の違いによる測位結果の違いはない。
(2) 最大衛星仰角はdefault設定通り、15°以上 75°以下が良かった。
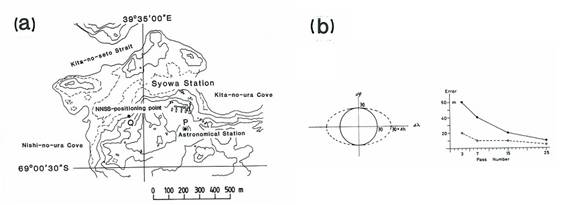
(3) 第1次隊の測量に基づく基地の地図上に計算結果として出てくるNNSS緯度・経度の地点をマークすると、図3(a)のように左(西)方向に約400 mずれる。
(4) パス数が3から15、25へと増えると水平面収束誤差は60mから20m、さらに10mへと良くなる。高さの収束誤差は20mから10m、さらに5mへと良くなる(図3(b)右)。
(5) アンテナ高度の初期値にbiasがのると、そのbiasは経度方向のbiasになって現れる(図3(b)左)。
(6) 受信日の電離層擾乱はリオメーター(relative ionospheric opacity meter)による銀河電波吸収度(CNA: cosmic noise absorption)によりモニターされている。擾乱が強いと衛星がlock-onしなかったり、Doppler count残差が大きかったりして、解析には不十分(insufficient)なパスという情報が出力されるが、その割合が静穏時の割合(26%)に較べ、38%と約1.5倍になった。
 |
|
| 図3(a) | 図3(b) |
| 図3.(a)地図上での天測点位置Pに対しNNSS受信で決まる座標Qは西へ約400mずれた位置になる。(b) パス数の関数として誤差を表示すると受信数15で水平面誤差は約20m、高さ誤差は約10mである。 | |
7日間の全受信パス数は265であった。このうち、電離層擾乱を示すCNA≧0.1時のデータを除いた192パスを用いて、post-processingを行った。解析にはJMR社の解析ソフトSP-2Gを用いた。結果は以下の通り。
(7) 解析において衛星時刻系を用いるか、受信機時刻系を用いるかのオプションがある。また、Doppler countの数え方としてdata bit timeを用いるかcross over timeを用いるかのオプションがある。従って組み合わせにより4通りの解析方法があるが、不完全(insufficient)パスが一番少なく、収束精度が一番良いのは受信機時刻系+cross over timeの組み合わせであった。
(8) 受信機上東側を通過するパス、西側を通過するパスのbalanceが悪いと、経度方向の測位精度のbalanceが悪くなる。特に西側を通るパスがないと、収束解は真の解より約5.2m西に寄り、東側を通るパスがないと、約5.5m東に寄った。この場合、緯度方向あるいは高さへの影響はあまり見られなかった。
(9) 最終収束解に対する偏差をパス数の関数として表示すると図4(a)のようになった。参考のために図4(b)に同様の条件下での東京での結果を示したが、昭和基地(高緯度)の方が、どの要素(緯度、経度、高さ)とも収束が遅かった。
(10) 逐次近似は3ステップで収束解に至り、それ以上行っても改善は見られない。
(11) 昭和基地でも東京でも、最終収束位置に対する距離ずれ (Δd)をパス数の関数として表示すると図4(c)の実線のように
![]() (17)
(17)
で近似されたが、2mより良くはならなかった。
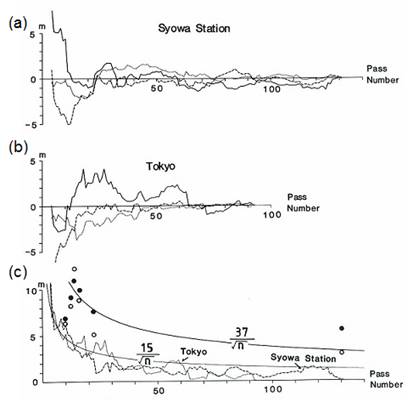 |
| 図4. パス数の関数としての誤差を最終解からのずれで図示した。太い実線は緯度方向(北を+)、細い実線は経度方向(東を+)、破線が高さ方向誤差である。(a)は昭和基地の場合、(b)は東京の場合である。直距離としての誤差は(c)のように |
表3に放送暦を用いて決定された昭和基地・天測点の座標値を示す。
4.天測による緯度、経度
NNSS受信を行った昭和基地天測点は、その名が示す通り、第1次隊の国土地理院・印部隊員が天文測量により緯度・経度を決定した点である。その測量報告は「南極地域観測隊報告(観測部門)、昭和32年4月5日、日本学術会議南極特別委員会の1.南極地域における地形班の観測報告1-9頁」で述べられている。観測を行った1956年2月2日―4日は白夜ということもあり、天体観測に用いる天頂儀(zenith telescope)と子午儀(meridian transit)を使うことができなかった。そのため、測角儀ウィルドT2を用いた太陽高度角の30対回観測により緯度を決定している.対回とは,ウィルドT2の望遠鏡が鉛直角目盛盤に対して右側(r)にある場合と,左側(l)にある場合の両方を測り,その整合性から所定の誤差内にあることを1回1回確かめることであり、国土地理院の「基準点測量・作業規程記載要領」に方法・手順が厳密に示されている。測定分解能は1秒である。
経度は太陽の南中時刻のグリニッジ時刻からのずれを測ることにより決定している。但し,平均時の季節変化の補正など、天体の動きについての煩雑な補正が必要である。時刻に誤差が1秒あると、約11 mの経度誤差が生じることになる。記録によると、ナルダン・クロノグラフ(図5(a))を用い、それを「宗谷」に持ち込んだ時報受信機で較正したとある。
 |
| 図5. (a) 第1次隊が経度観測に用いたナルダン・クロノグラフ。(b) 第1隊の天測点での測量後、第3次隊が設置した金属標。国土地理院・南極観測五十年史(2007)による。 |
以上により決定された位置は
φ = 69˚00’22”S ±4” (18)
であった。第1次隊は天測点の岩盤に十字を刻んだだけで引き揚げたが、第3次隊(1958)が図5(b)に示す金属標を設置している。
第1次隊は限られた時間のなかで、東オングル島の地図作りのための基準点測量も実施している。図6が、その測地基準点網である。天測点(中黒白丸)から方位標(白丸)を取り付け(方位100˚18’12”±7”)、基線は2mのウィルド社製サブテンスバーを使い設定し、ウィルドT2の5対回観測でその長さを235.71 mと定めたとある。そして、その基線長を用いて図6の網の各基線長を求めた。このような天測と三角測量、航空写真を組み合わせた測地測量による地図作製は第26次隊(1984)までの約50露岩域について行われている。
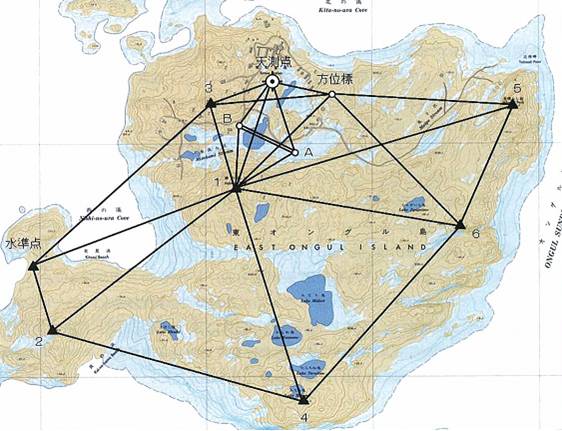 |
| 図6. 第1次隊が作成した昭和基地・東オングル島の地図。天測位置をもとに測距・測角測量を行なった三角点(1~6)について測地座標を定めた。国土地理院・南極観測五十年史(2007)による。 |
(18), (18)’式に示された誤差はともに約120 mで現代の感覚からすると2桁から3桁大きいが、地図のないところに地図を作るのが如何に大変な作業だったかがわかる。わずか30年前まで、大航海時代と同じ方法が使われていた(使わざるを得なかった)ことはとても感慨深いものがある。
5.鉛直線偏差
図3(a)において天文測量による位置PがNNSS受信による位置Qに値として一致しない最大の理由は「鉛直線偏差」にある。経緯儀は、水準儀を用いて決められる重力の方向に直交する「水平面」に置かれた、という前提で太陽高度角を測るが、その鉛直線を延長しても地球重心を通るわけではない。それは、観測点近傍の質量分布は必ずと言って良いほど均一ではなく、ローカルな質量分布の起伏が、等重力ポテンシャル面(そのひとつがジオイド)の起伏となり、鉛直線方向に偏りが生じるからである。一方、測地測量では測地原点(今の場合天測点)に設定された準拠楕円体の面上に座標を決定するが、楕円体の面は等重力ポテンシャル面と異なり起伏がない。測地座標は、この起伏のない準拠楕円体への幾何学的な法線(垂直線)に基づいて決定される。そのため、ジオイドへの鉛直線に基づいて決定される天文経緯度と、楕円体への垂直線に基づいて決定される測地経緯度は、鉛直線と垂直線が一致しない限り、等しくならない。楕円体上の点に立てた垂直線が、鉛直線に対して持つ「傾き角」を鉛直線偏差(deflection of plumbline)と呼ぶ。昭和基地付近のようにもし、天文測量による基準点が各露岩域にあり、個々の露岩毎に三角測量が実施された場合、地球重心からずれ、なおかつ、その原点が一致しない地球楕円体を多数考慮しなければならなくなる。
一方、衛星がいくつあろうと、また、地球の質量分布がいかに偏ろうと、それらの衛星は地球重心(場所はわからなくとも1点しかない)を原点とする3次元直交座標空間をニュートンの法則に従って飛ぶと考えて差し支えない。図7は衛星が航行する座標系及び付随する楕円体(添え字E)に対して、天文測量に準拠したローカルな座標系及び付随する楕円体(添え字B)のずれを誇張した形で位置関係を示したものである。
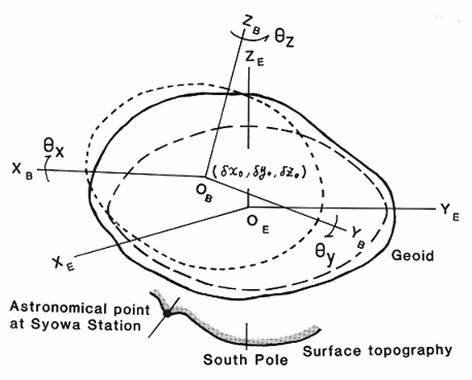 |
| 図7. NNSSの準拠する楕円体(破線)は近似的に地球中心(重心)を原点とするが、天測に基づいて測地測量を行なった地図の準拠する楕円体(点線)は中心がずれるほか、方向もねじれる。実線は現実の地球の形状を示す、起伏のあるジオイドである。 |
同一の地点だが定義の異なる楕円体上の位置について緯度・経度の差がわかれば、楕円体原点のオフセット量(δx0, δy0, δz0)をHeiskanen and Moritz (1962)の変換式を用いて計算できる。但し、図7において3軸の回転(θx, θy, θz)とスケールファクターε(図示していない)はゼロと置いて無視している。
δx0 = a sinφcosλδφ + a cosφsinλδλ – cosφcosλ (δh +δa + a sin2φδf) , (19-1)
δy0 =a sinφsinλδφ − a cosφcosλδλ – cosφsinλ (δh +δa + a sin2φδf) , (19-2)
δz0 =−a cosφδφ – sinφ (δh +δa + a sin2φδf) + 2a sinφδf . (19-3)
今の場合、天測に基づく座標は測地基準系1967 (Geodetic Reference System 1967; GRS67)で与えられ、NNSS座標はWorld Geodetic System 1972 (WGS-72)で与えられているので、(19)式に代入すべき値は表4のようにまとめられる。代入結果は
δx0 = −293.8 m (20-1)
δy0 = 226.3 m (20-2)
δz0 = −28.7 m (20-3)
である。
表1に示したように、国土地理院が南極での地図作成にNNSS受信機を利用し始めたのは、JARE-24 (1982年) からである。本来的には天文測量を行った各天測点においてNNSS受信を行い、露岩域毎に(20)式と同様な偏心座標を求め、NNSS座標系に座標変換すべきである。しかし、100 km四方の地域の場合、偏心座標の変化幅は小さいはずである。国土地理院はWGS-72系での3次元座標値をGRS67系での座標値に変換する場合、第21次隊の実験を参照し、δx0 = 292.82 m, δy0 = −227.49 m, δz0 = 29.93 mを採用している。この場合、符号が(20)式と逆符号になることに注意を要する。
参考文献
Guier, W.H., 1961. Ionospheric contributions to the Doppler shift at VHF from
near-earth satellites. Proc. Inst. Radio Electron. Eng., 49, 1680-1681.
Guier, W.H., Weiffenbach, G.C., 1958. Theoretical Analysis of Doppler Radiation Signals
from Earth Satellites. JHU/APL Report BB-276.
Heiskanen, W.A., Moritz, H., 1967. Physical Geodesy, San Francisco, W.H. Freeman,
364p.
木村小一、1977. 衛星航法、海文堂、190頁。
国土地理院、2007. 南極観測五十年史。第I章、南極地域観測の変遷、1-90頁。国土地理
院、690頁。
McClure, F.T., "Method of Navigation", U.S. Patent No. 3.172.108 filed 12 May 1958
issued 2 March 1965.
Moffett, J.B., 1971. Program requirements for two-minute integrated Doppler satellite
navigation solution. Technical Memorandum AD 731663, Johns Hopkins University.
日本学術会議 南極特別委員会、1957. 南極地域観測隊報告(観測部門)1.南極地域に
於ける地形班の観測報告(鍛冶晃三)、1-9頁。
Pryor, L., 1989. TRANSIT-status, policy, and plans. Presented at the Fifth
International Geodetic Symposium on Satellite Positioning, 19pp. Las Cruces,
New Mexico, 13-17 March.
Seppelin, T.O., 1974. The Department of Defense World Geodetic System 1972.
Presented at the International Symposium on Problems Related to the Redefinition
of North American Geodetic Networks, 43pp., May 20-25, Fredericton, Canada.
Shibuya, K., Ito, K., Kaminuma, K., 1982. Utilization of an NNSS receiver in the
explosion seismic experiments on the Prince Olav Coast, East Antarctica. 2.
Positioning. Antarctic Record, 76, 73-88.
Shibuya, K., 1985. Performance experiment of an NNSS positioning in and around
Syowa Station, East Antarctica. J. Phys. Earth, 33, 453-483.
http://en.wikipedia.org/wiki/Transit_(satellite) visited 30 January 2012
表1. TRANSITシステムの歴史と赤字で示すJAREでの運用の歴史 |
|
October 4, 1957 |
Sputnik I Launched |
May 12, 1958 |
Transit System Invented |
April 13, 1960 |
Transit 1B satellite was launched |
April 10, 1962 |
Navy Astronautics Group (NAG) Comissioned |
1963 |
System in Navigational Use |
1964 |
System entered into Naval Service |
April 29, 1967 |
Made Available to The Public |
October 11, 1968 |
Declared an Operational System |
November 1979 |
JARE-20 used in the Yamato-Belgica Traverse Survey |
April 1980 |
JARE-21 made performance test in Syowa Station |
October-November 1980 |
JARE-21 used in the positioning of 27 seismic stations |
1982 - 1988 |
GSI, Japan operated JMR-1/4A during the survey, |
October 1, 1983 |
Transitioned to The Navy Space Command |
1996 |
Ceased Navigation Service |
表2. 放送軌道要素とその例 |
|||||
放送軌道要素 |
Broadcast ephemeris |
記号 |
位置 |
値 |
単位 |
近地点通過時刻 |
Time of perigee |
tp |
56 |
1334.3647 |
min |
平均運動 |
Mean motion |
n |
62 |
3.3670495 |
deg/min |
近地点引数 |
Argument of perigee |
ω |
68 |
187.9334 |
degree |
その変化率 |
Rate of change of above |
|
74 |
0.0019776 |
deg/min |
離心率 |
Eccentricity |
e |
80 |
0.01759 |
|
長半径 |
Semi-major axis |
A |
86 |
7462.12 |
km |
昇降点経度 |
Right ascension of ascending node |
Ώ |
92 |
272.2642 |
degree |
その変化率 |
Rate of change of above |
|
98 |
0.00001 |
deg/min |
軌道傾斜角のcosine |
Cosine of inclination |
cos i |
104 |
−0.002497 |
|
グリニッジ時角 |
Right ascension of Greenwich |
ΛG |
110 |
187.6648 |
degree |
軌道傾斜角のsine |
Sine of inclination |
sin i |
128 |
0.999997 |
|
周波数オフセット |
Frequency offset |
ΔFL |
134 |
80.074 |
ppm |
例として挙げられているデータはID = 30190の衛星について00h24mUT, 26 April 1980に昭和基地で捕捉されたパスの値である。
表3. 昭和基地天測点 |
|
受信の放送暦による決定位置の概要 |
|
処理パス総数 |
192 |
採用パス数 |
131 |
北行パス数 |
70 |
南行パス数 |
61 |
西側通過パス数 |
43 |
東側通過パス数 |
88 |
不採用パス数 |
61 |
Doppler countのバランス不良 |
|
あるいはcount数不足のパス |
46 |
統計検定により除去されたパス |
15 |
最終解(3次元直交座標) |
|
X = 1766411.12 m |
|
Y = 1460313.07 m |
|
Z = −5932236.56 m |
|
|
|
最終解(測地座標:WGS-72楕円体上)* 誤差はformal errorである。 |
|
φ = 69˚00’19.179"S ± 0.25 m* |
|
λ = 39˚34’51.394”E ± 0.32 m* |
|
H = 56.07 m ± 0.30 m* (Ellipsoidal height) |
|
表4. 天文測量位置(GRS67楕円体)からNNSS測量位置(WGS-72楕円体)への変換に伴う原点オフセットを計算するためのパラメーター |
|
GRS67系での位置(図3(a)のP) |
WGS-72系での位置(図3(a)のQ) |
φ = 69˚00’22”S |
φ = 69˚00’19.179"S |
λ = 39˚35’24”E |
λ = 39˚34’51.394”E |
h = 29.18 m (above m.s.l.) |
H = 56.07 m (Ellipsoidal height) |
| a = 6378135 m |
δa = 6378135 − 6378160 = −25 m |
f = 1/298.26 |
δf = 1/298.26 − 1/298.25 = −1.1241 x 10−7 |
δφ = −69˚00’19.179" − (−69˚00’22”S) = 2.821" |
|
δλ = 39˚34’51.394” − 39˚35’24” = −32.606" |
|
δh = 56.07 − 29.18 = 26.89 m (Geoid height) |
|
Q and A
Q: NNSSはGPSの登場によって、すたれた技術のように思えます。今さら、その歴史を学んでも得るところがないのではありませんか?
A: 後ほど用意する昭和基地のDORIS基準点のノートを読んで頂くと判るのですが、Doppler測量の原理は現在(2012年)でも衛星軌道決定に使われています。Guier and Weiffenbach (1958)と逆のやり方ですが、地上にほぼ均等に配置した発信局(ビーコン)の電波を衛星で受信してDoppler shiftを測定し、測定データを中央局にダウンロードして、衛星軌道を1−2 cm精度で決定する仕組みをフランス宇宙局が運用しています。Topex/Poseidon, Jasonという衛星が対象ですが、これらの衛星はレーダー高度計を積んでいて、海面高度の分布を1−2 cm精度で決め、その地域的な分布、時間(季節、経年)変化などを調べています。このように、技術はすたれることなく、形を変えて引き継がれて行きます。